 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Barrier Functions-based Semi-Definite Programs (CBF-SDPs): Robust Safe Control For Dynamic Systems with Relative Degree Two Safety Indices
Aug 25, 2022In this draft article, we consider the problem of achieving safe control of a dynamic system for which the safety index or (control barrier function (loosely)) has relative degree equal to two. We consider parameter affine nonlinear dynamic systems and assume that the parametric uncertainty is uniform and known a-priori or being updated online through an estimator/parameter adaptation law. Under this uncertainty, the usual CBF-QP safe control approach takes the form of a robust optimization problem. Both the right hand side and left hand side of the inequality constraints depend on the unknown parameter. With the given representation of uncertainty, the CBF-QP safe control ends up being a convex semi-infinite problem. Using two different philosophies, one based on weak duality and another based on the Lossless s-procedure, we arrive at identical SDP formulations of this robust CBF-QP problem. Thus we show that the problem of computing safe controls with known parametric uncertainty can be posed as a tractable convex problem and be solved online. (This is work in progress).
Parameter Identification for Multirobot Systems Using Optimization Based Controllers (Extended Version)
Sep 29, 2020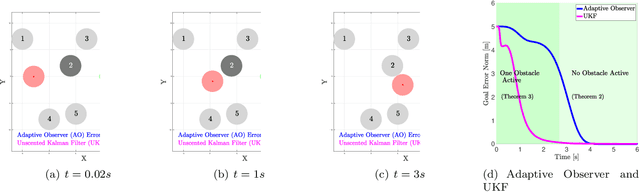
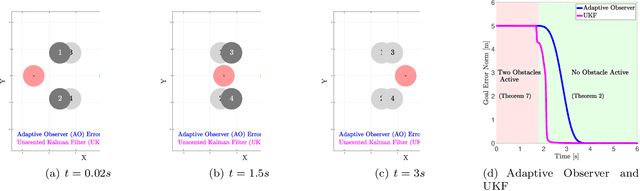
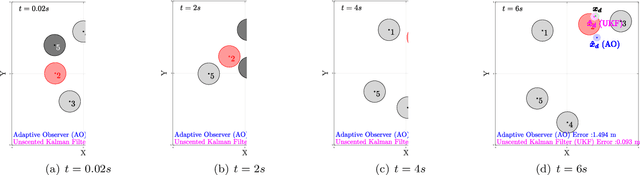
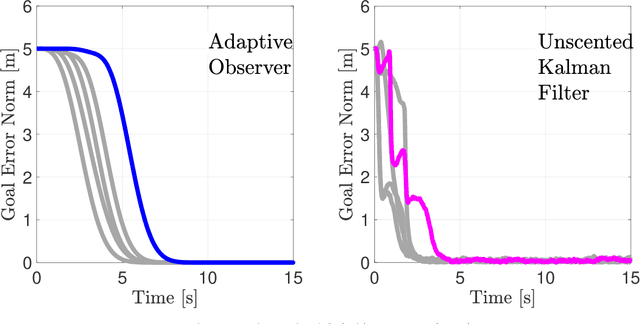
This paper considers the problem of parameter identification for a multirobot system. We wish to understand when is it feasible for an adversarial observer to reverse-engineer the parameters of tasks being performed by a team of robots by simply observing their positions. We address this question by using the concept of persistency of excitation from system identification. Each robot in the team uses optimization-based controllers for mediating between task satisfaction and collision avoidance. These controllers exhibit an implicit dependence on the task's parameters which poses a hurdle for deriving necessary conditions for parameter identification, since such conditions usually require an explicit relation. We address this bottleneck by using duality theory and SVD of active collision avoidance constraints and derive an explicit relation between each robot's task parameters and its control inputs. This allows us to derive the main necessary conditions for successful identification which agree with our intuition. We demonstrate the importance of these conditions through numerical simulations by using (a) an adaptive observer and (b) an unscented Kalman filter for goal estimation in various geometric settings. These simulations show that under circumstances where parameter inference is supposed to be infeasible per our conditions, both these estimators fail and likewise when it is feasible, both converge to the true parameters. Videos of these results are available at https://bit.ly/3kQYj5J.