 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractice Makes Perfect: A Study of Digital Twin Technology for Assembly and Problem-solving using Lunar Surface Telerobotics
May 19, 2025Robotic systems that can traverse planetary or lunar surfaces to collect environmental data and perform physical manipulation tasks, such as assembling equipment or conducting mining operations, are envisioned to form the backbone of future human activities in space. However, the environmental conditions in which these robots, or "rovers," operate present challenges toward achieving fully autonomous solutions, meaning that rover missions will require some degree of human teleoperation or supervision for the foreseeable future. As a result, human operators require training to successfully direct rovers and avoid costly errors or mission failures, as well as the ability to recover from any issues that arise on the fly during mission activities. While analog environments, such as JPL's Mars Yard, can help with such training by simulating surface environments in the real world, access to such resources may be rare and expensive. As an alternative or supplement to such physical analogs, we explore the design and evaluation of a virtual reality digital twin system to train human teleoperation of robotic rovers with mechanical arms for space mission activities. We conducted an experiment with 24 human operators to investigate how our digital twin system can support human teleoperation of rovers in both pre-mission training and in real-time problem solving in a mock lunar mission in which users directed a physical rover in the context of deploying dipole radio antennas. We found that operators who first trained with the digital twin showed a 28% decrease in mission completion time, an 85% decrease in unrecoverable errors, as well as improved mental markers, including decreased cognitive load and increased situation awareness.
A Methodology to Assess the Human Factors Associated with Lunar Teleoperated Assembly Tasks
May 16, 2020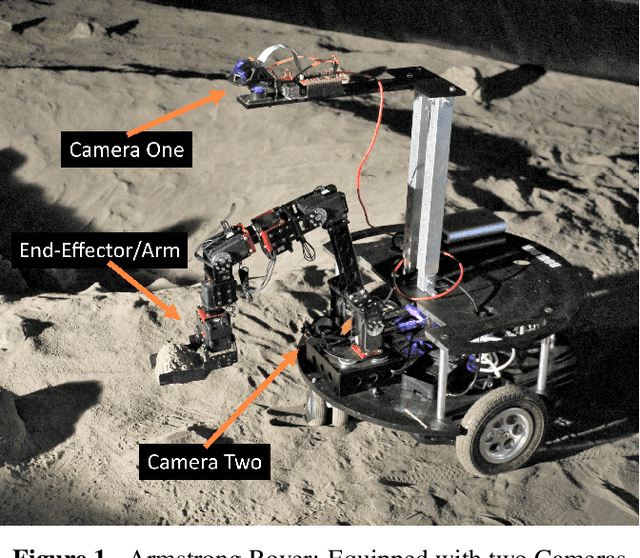
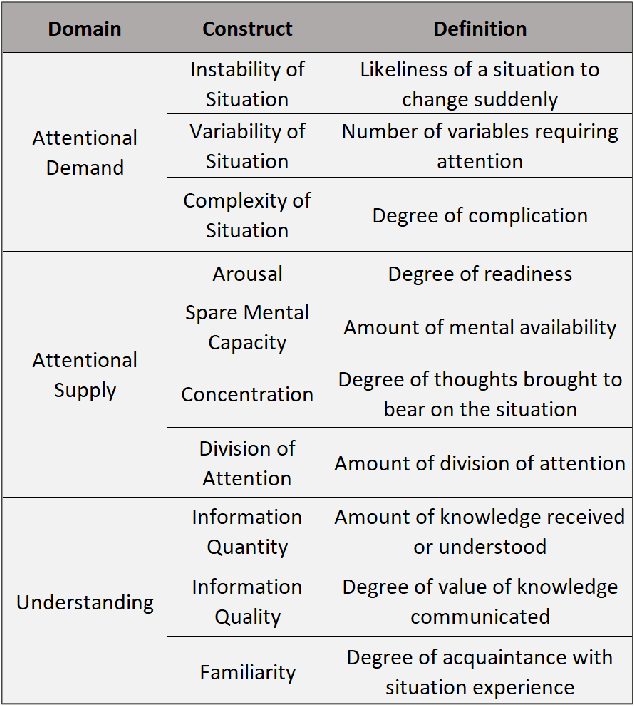
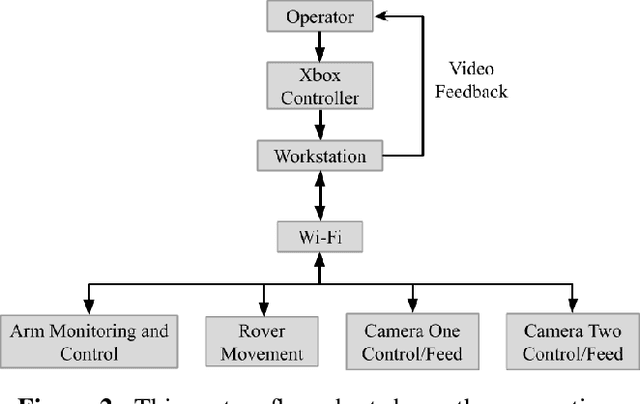
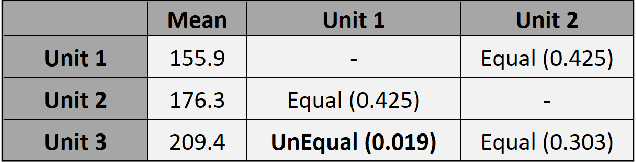
Low-latency telerobotics can enable more intricate surface tasks on extraterrestrial planetary bodies than has ever been attempted. For humanity to create a sustainable lunar presence, well-developed collaboration between humans and robots is necessary to perform complex tasks. This paper presents a methodology to assess the human factors, situational awareness (SA) and cognitive load (CL), associated with teleoperated assembly tasks. Currently, telerobotic assembly on an extraterrestrial body has never been attempted, and a valid methodology to assess the associated human factors has not been developed. The Telerobotics Laboratory at the University of Colorado-Boulder created the Telerobotic Simulation System (TSS) which enables remote operation of a rover and a robotic arm. The TSS was used in a laboratory experiment designed as an analog to a lunar mission. The operator's task was to assemble a radio interferometer. Each participant completed this task under two conditions, remote teleoperation (limited SA) and local operation (optimal SA). The goal of the experiment was to establish a methodology to accurately measure the operator's SA and CL while performing teleoperated assembly tasks. A successful methodology would yield results showing greater SA and lower CL while operating locally. Performance metrics showed greater SA and lower CL in the local environment, supported by a 27% increase in the mean time to completion of the assembly task when operating remotely. Subjective measurements of SA and CL did not align with the performance metrics. Results from this experiment will guide future work attempting to accurately quantify the human factors associated with telerobotic assembly. Once an accurate methodology has been developed, we will be able to measure how new variables affect an operator's SA and CL to optimize the efficiency and effectiveness of telerobotic assembly tasks.