 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based Learning of Electrical Cabinet Assembly Using Robot Skills
Feb 16, 2026This paper presents a simulation-driven approach for automating the force-controlled assembly of electrical terminals on DIN-rails, a task traditionally hindered by high programming effort and product variability. The proposed method integrates deep reinforcement learning (DRL) with parameterizable robot skills in a physics-based simulation environment. To realistically model the snap-fit assembly process, we develop and evaluate two types of joining models: analytical models based on beam theory and rigid-body models implemented in the MuJoCo physics engine. These models enable accurate simulation of interaction forces, essential for training DRL agents. The robot skills are structured using the pitasc framework, allowing modular, reusable control strategies. Training is conducted in simulation using Soft Actor-Critic (SAC) and Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithms. Domain randomization is applied to improve robustness. The trained policies are transferred to a physical UR10e robot system without additional tuning. Experimental results demonstrate high success rates (up to 100%) in both simulation and real-world settings, even under significant positional and rotational deviations. The system generalizes well to new terminal types and positions, significantly reducing manual programming effort. This work highlights the potential of combining simulation-based learning with modular robot skills for flexible, scalable automation in small-batch manufacturing. Future work will explore hybrid learning methods, automated environment parameterization, and further refinement of joining models for design integration.
Wireless Multi-Sensor Networks for Smart Cities: A Prototype System with Statistical Data Analysis
Jul 20, 2018

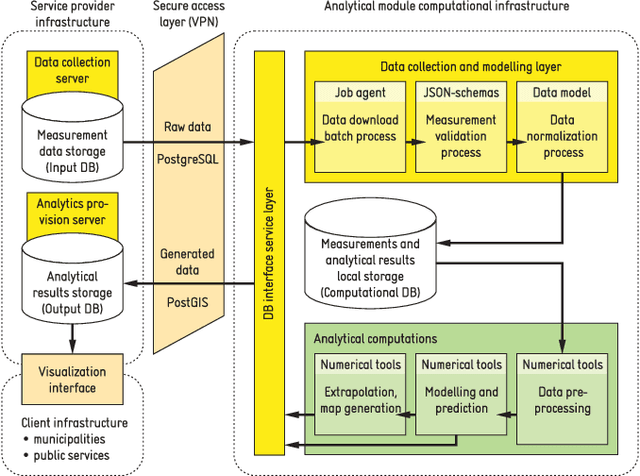
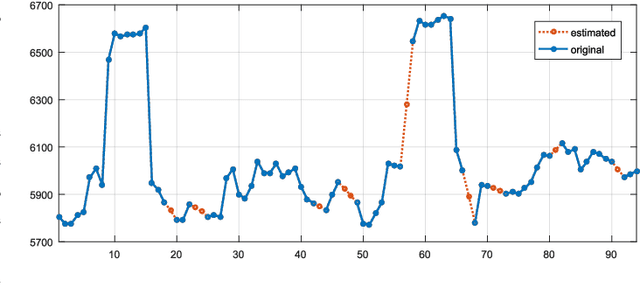
As urbanization proceeds at an astonishing rate, cities have to continuously improve their solutions that affect the safety, health and overall wellbeing of their residents. Smart city projects worldwide build on advanced sensor, information and communication technologies to help dealing with issues like air pollution, waste management, traffic optimization, and energy efficiency. The paper reports about the prototype of a smart city initiative in Budapest which applies various sensors installed on the public lighting system and a cloud-based analytical module. While the installed wireless multi-sensor network gathers information about a number of stressors, the module integrates and statistically processes the data. The module can handle inconsistent, missing and noisy data and can extrapolate the measurements in time and space, namely, it can create short-term forecasts and smoothed maps, both accompanied by reliability estimates. The resulting database uses geometric representations and can serve as an information centre for public services.
* 9 pages, 8 figures, 3 tables, 27 references