 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA compliant ankle-actuated compass walker with triggering timing control
Feb 06, 2026Passive dynamic walkers are widely adopted as a mathematical model to represent biped walking. The stable locomotion of these models is limited to tilted surfaces, requiring gravitational energy. Various techniques, such as actuation through the ankle and hip joints, have been proposed to extend the applicability of these models to level ground and rough terrain with improved locomotion efficiency. However, most of these techniques rely on impulsive energy injection schemes and torsional springs, which are quite challenging to implement in a physical platform. Here, a new model is proposed, named triggering controlled ankle actuated compass gait (TC-AACG), which allows non-instantaneous compliant ankle pushoff. The proposed technique can be implemented in physical platforms via series elastic actuators (SEAs). Our systematic examination shows that the proposed approach extends the locomotion capabilities of a biped model compared to impulsive ankle pushoff approach. We provide extensive simulation analysis investigating the locomotion speed, mechanical cost of transport, and basin of attraction of the proposed model.
Extending The Lossy Spring-Loaded Inverted Pendulum Model with a Slider-Crank Mechanism
Jun 05, 2015

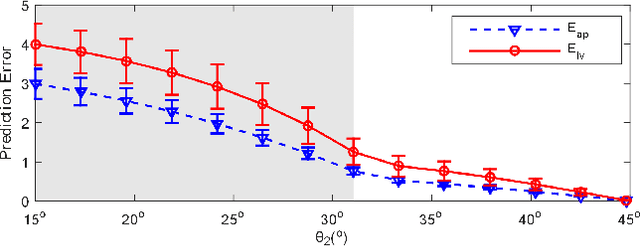
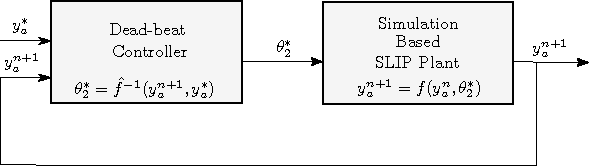
Spring Loaded Inverted Pendulum (SLIP) model has a long history in describing running behavior in animals and humans as well as has been used as a design basis for robots capable of dynamic locomotion. Anchoring the SLIP for lossy physical systems resulted in newer models which are extended versions of original SLIP with viscous damping in the leg. However, such lossy models require an additional mechanism for pumping energy to the system to control the locomotion and to reach a limit-cycle. Some studies solved this problem by adding an actively controllable torque actuation at the hip joint and this actuation has been successively used in many robotic platforms, such as the popular RHex robot. However, hip torque actuation produces forces on the COM dominantly at forward direction with respect to ground, making height control challenging especially at slow speeds. The situation becomes more severe when the horizontal speed of the robot reaches zero, i.e. steady hoping without moving in horizontal direction, and the system reaches to singularity in which vertical degrees of freedom is completely lost. To this end, we propose an extension of the lossy SLIP model with a slider-crank mechanism, SLIP- SCM, that can generate a stable limit-cycle when the body is constrained to vertical direction. We propose an approximate analytical solution to the nonlinear system dynamics of SLIP- SCM model to characterize its behavior during the locomotion. Finally, we perform a fixed-point stability analysis on SLIP-SCM model using our approximate analytical solution and show that proposed model exhibits stable behavior in our range of interest.