 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Guide Adaptive Depth Sampling?
May 20, 2022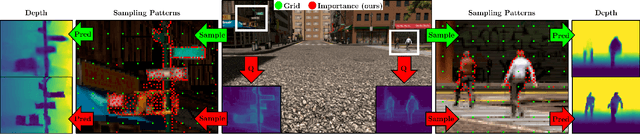
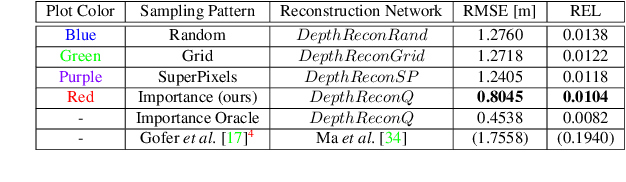
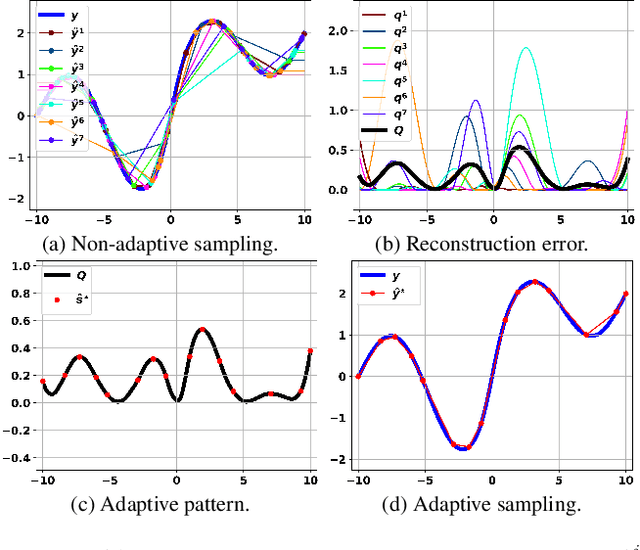
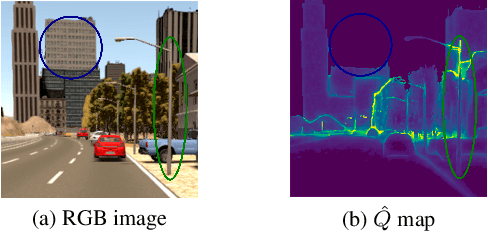
Recent advances in depth sensing technologies allow fast electronic maneuvering of the laser beam, as opposed to fixed mechanical rotations. This will enable future sensors, in principle, to vary in real-time the sampling pattern. We examine here the abstract problem of whether adapting the sampling pattern for a given frame can reduce the reconstruction error or allow a sparser pattern. We propose a constructive generic method to guide adaptive depth sampling algorithms. Given a sampling budget B, a depth predictor P and a desired quality measure M, we propose an Importance Map that highlights important sampling locations. This map is defined for a given frame as the per-pixel expected value of M produced by the predictor P, given a pattern of B random samples. This map can be well estimated in a training phase. We show that a neural network can learn to produce a highly faithful Importance Map, given an RGB image. We then suggest an algorithm to produce a sampling pattern for the scene, which is denser in regions that are harder to reconstruct. The sampling strategy of our modular framework can be adjusted according to hardware limitations, type of depth predictor, and any custom reconstruction error measure that should be minimized. We validate through simulations that our approach outperforms grid and random sampling patterns as well as recent state-of-the-art adaptive algorithms.
Image-Guided Depth Sampling and Reconstruction
Aug 04, 2019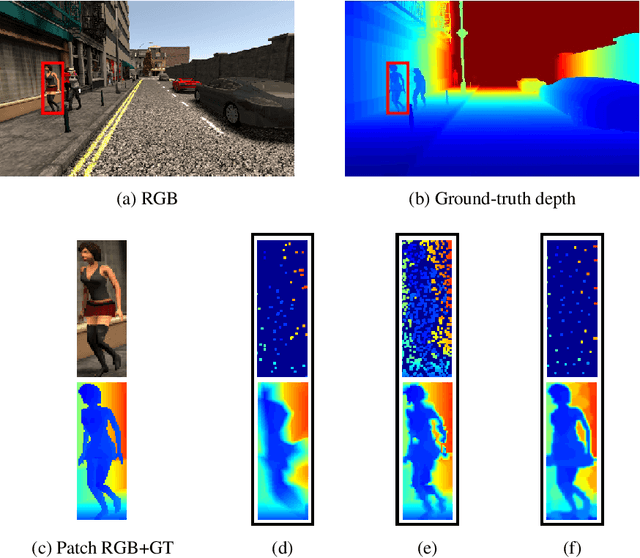
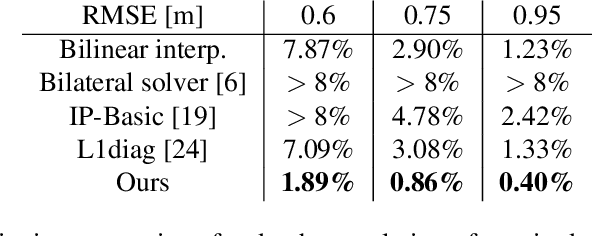
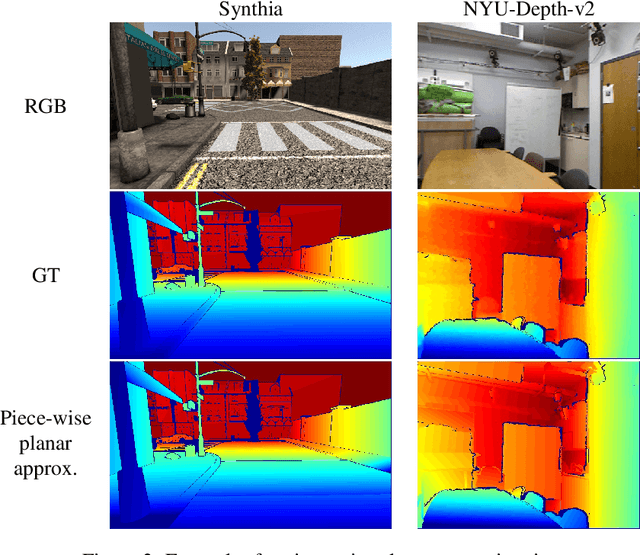
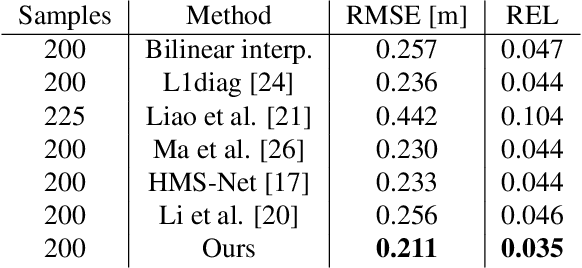
Depth acquisition, based on active illumination, is essential for autonomous and robotic navigation. LiDARs (Light Detection And Ranging) with mechanical, fixed, sampling templates are commonly used in today's autonomous vehicles. An emerging technology, based on solid-state depth sensors, with no mechanical parts, allows fast, adaptive, programmable scans. In this paper, we investigate the topic of adaptive, image-driven, sampling and reconstruction strategies. First, we formulate a piece-wise linear depth model with several tolerance parameters and estimate its validity for indoor and outdoor scenes. Our model and experiments predict that, in the optimal case, about 20-60 piece-wise linear structures can approximate well a depth map. This translates to a depth-to-image sampling ratio of about 1/1200. We propose a simple, generic, sampling and reconstruction algorithm, based on super-pixels. We reach a sampling rate which is still far from the optimal case. However, our sampling improves grid and random sampling, consistently, for a wide variety of reconstruction methods. Moreover, our proposed reconstruction achieves state-of-the-art results, compared to image-guided depth completion algorithms, reducing the required sampling rate by a factor of 3-4. A single-pixel depth camera built in our lab illustrates the concept.