 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Tracking Control of UAV Bicopter using Linear Quadratic Gaussian
Sep 15, 2023This paper describes the design of a linear quadratic gaussian (LQG) for trajectory tracking control of UAV Bicopter. In this work, disturbance in the form of payload significantly affects the trajectory tracking control process on the UAV Bicopter when using a linear quadratic regulator (LQR) controller. The use of a LQR control will be optimal in the case of a state regulator towards an equilibrium point in a system, but for the tracking case, the LQR controller is not capable of optimally, especially in systems that have high levels of nonlinearity and system dynamic changes such as inertial disturbances. Therefore, this paper proposes the design of a LQG control that is expected to overcome system dynamic changes, in this case in the form of inertial disturbances to the UAV Bicopter when carrying a payload. The success of LQG control was tested in two scenarios, the first trajectory tracking at a circular position and the second with the position of the trajectory number "8". The simulation results show that the proposed LQG controller successfully overcame inertial disturbances when the UAV Bicopter performs trajectory tracking. When given an inertial disturbance, the trajectory tracking test results show that the LQG control has a lower root mean square error (RMSE) value than the LQR control.
Attitude Control and Low Cost Design of UAV Bicopter
Sep 15, 2023This paper present a control system for the attitude and low cost design of a Bicopter. The control system uses a PID controller that receives feedback from an IMU to calculate control inputs that adjust the Bicopters attitude (roll, pitch and yaw angles) which is resistant to disturbances (wind noise) on a test bed. The control system is implemented on a hardware platform consisting of a Bicopter, an IMU sensor, and a microcontroller with low cost design. In mechanical design, the Bicopter is designed to more closely resemble the letter "V" so that the distribution of the centre of mass (CoM) of the Bicopter can be such that the servomotor torque reaction is parallel to the axis of rotation of the Bicopter during the movement of the pitch angle attitude. In electronic design, the Bicopter was developed using the ATmega328P microcontroller.
NightOwl: Robotic Platform for Wheeled Service Robot
Oct 29, 2020
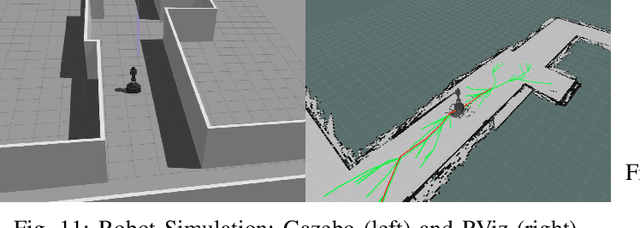
NightOwl is a robotic platform designed exclusively for a wheeled service robot. The robot navigates autonomously in omnidirectional fashion movement and equipped with LIDAR to sense the surrounding area. The platform itself was built using the Robot Operating System (ROS) and written in two different programming languages (C++ and Python). NightOwl is composed of several modular programs, namely hardware controller, light detection and ranging (LIDAR), simultaneous localization and mapping (SLAM), world model, path planning, robot control, communication, and behaviour. The programs run in parallel and communicate reciprocally to share various information. This paper explains the role of modular programs in the term of input, process, and output. In addition, NightOwl provides simulation visualized in both Gazebo and RViz. The robot in its environment is visualized by Gazebo. Sensor data from LIDAR and results from SLAM will be visualized by RViz.
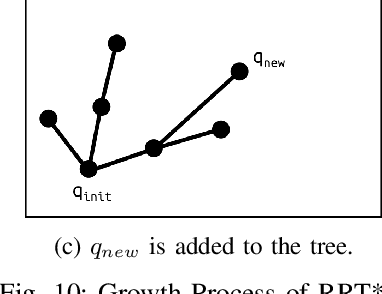
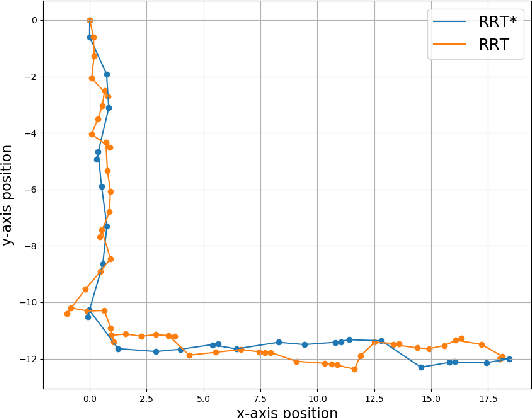
Real-Time Kinodynamic Motion Planning for Omnidirectional Mobile Robot Soccer using Rapidly-Exploring Random Tree in Dynamic Environment with Moving Obstacles
May 12, 2019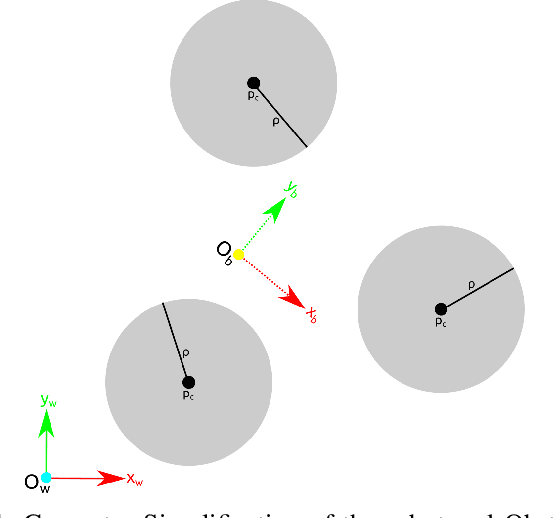
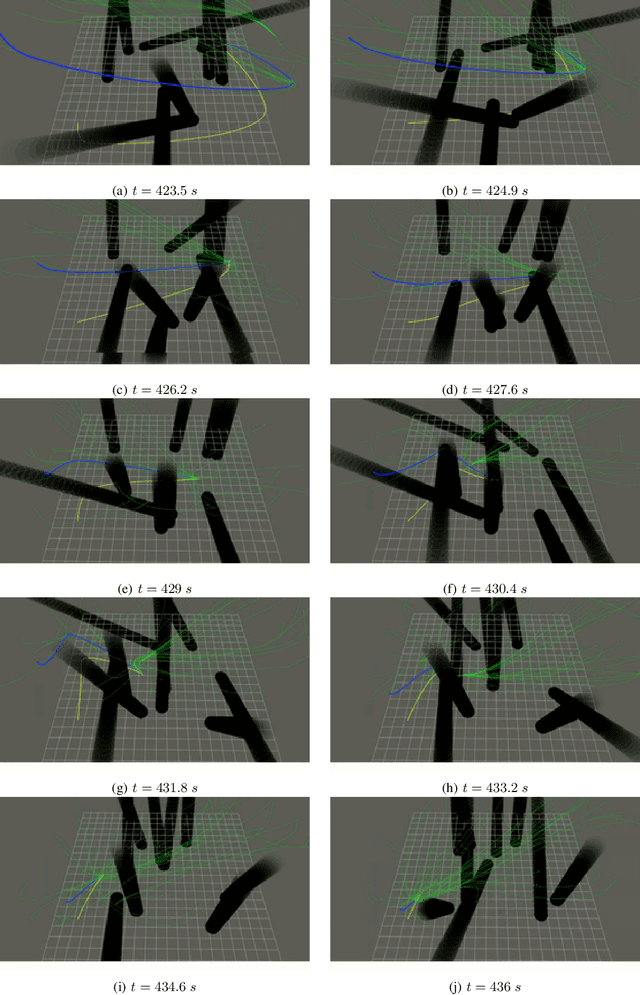
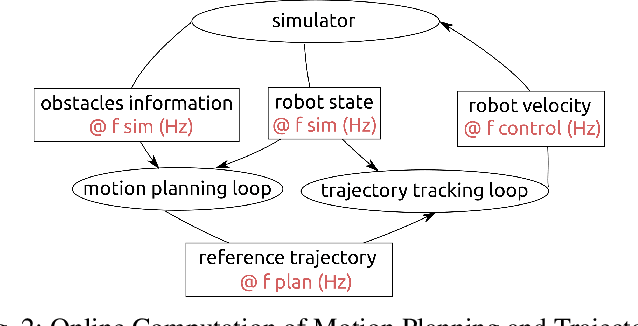
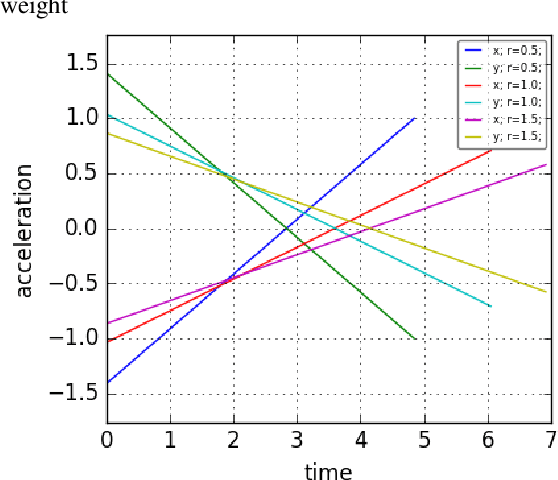
RoboCup Middle Size League (RoboCup MSL) provides a standardized testbed for research on mobile robot navigation, multi-robot cooperation, communication and integration via robot soccer competition in which the environment is highly dynamic and adversarial. One of important research topic in such area is kinodynamic motion planning that plan the trajectory of the robot while avoiding obstacles and obeying its dynamics. Kinodynamic motion planning for omnidirectional robot based on kinodynamic-RRT* method is presented in this work. Trajectory tracking control to execute the planned trajectory is also considered in this work. Robot motion planning in translational and rotational direction are decoupled. Then we implemented kinodynamic-RRT* with double integrator model to plan the translational trajectory. The rotational trajectory is generated using minimum-time trajectory generator satisfying velocity and acceleration constraints. The planned trajectory is then tracked using PI-Control. To address changing environment, we developed concurrent sofware module for motion planning and trajectory tracking. The resulting system were applied and tested using RoboCup simulation system based on Robot Operating System (ROS). The simulation results that the motion planning system are able to generate collision-free trajectory and the trajectory tracking system are able to follow the generated trajectory. It is also shown that in highly dynamic environment the online scheme are able to re-plan the trajectory.