 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem Identification for Virtual Sensor-Based Model Predictive Control: Application to a 2-DoF Direct-Drive Robotic Arm
May 29, 2025Nonlinear Model Predictive Control (NMPC) offers a powerful approach for controlling complex nonlinear systems, yet faces two key challenges. First, accurately modeling nonlinear dynamics remains difficult. Second, variables directly related to control objectives often cannot be directly measured during operation. Although high-cost sensors can acquire these variables during model development, their use in practical deployment is typically infeasible. To overcome these limitations, we propose a Predictive Virtual Sensor Identification (PVSID) framework that leverages temporary high-cost sensors during the modeling phase to create virtual sensors for NMPC implementation. We validate PVSID on a Two-Degree-of-Freedom (2-DoF) direct-drive robotic arm with complex joint interactions, capturing tip position via motion capture during modeling and utilize an Inertial Measurement Unit (IMU) in NMPC. Experimental results show our NMPC with identified virtual sensors achieves precise tip trajectory tracking without requiring the motion capture system during operation. PVSID offers a practical solution for implementing optimal control in nonlinear systems where the measurement of key variables is constrained by cost or operational limitations.
On simplification of Dual-Youla approach for closed-loop identification
Dec 15, 2020
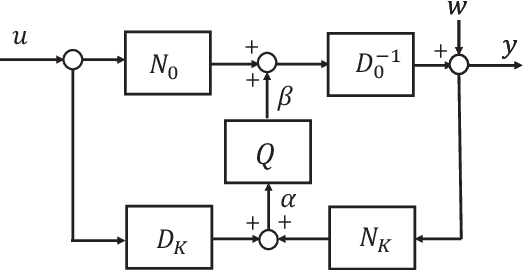


The dual Youla method for closed loop identification is known to have several practically important merits. Namely, it provides an accurate plant model irrespective of noise models, and fits inherently to handle unstable plants by using coprime factorization. In addition, the method is empirically robust against the uncertainty of the controller knowledge. However, use of coprime factorization may cause a big barrier against industrial applications. This paper shows how to derive a simplified version of the method which identifies the plant itself without coprime factorization, while enjoying all the merits of the dual Youla method. This simplified version turns out to be identical to the stabilized prediction error method which was proposed by the authors recently. Detailed simulation results are given to demonstrate the above merits.