 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Manufacturing, and Controls of a Prismatic Quadruped Robot: PRISMA
Dec 27, 2021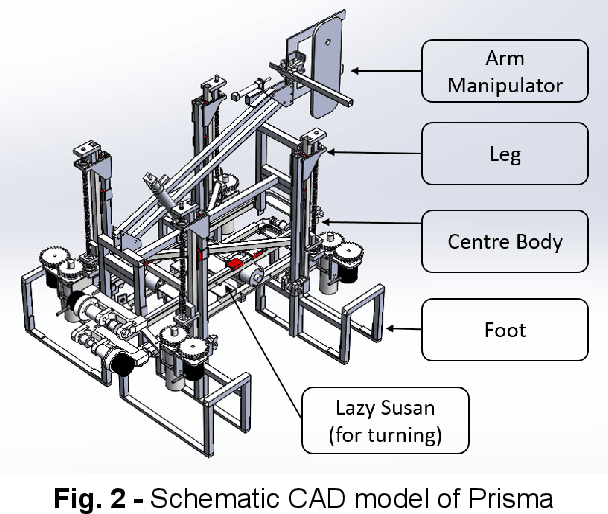
Most of the quadrupeds developed are highly actuated, and their control is hence quite cumbersome. They need advanced electronics equipment to solve convoluted inverse kinematic equations continuously. In addition, they demand special and costly sensors to autonomously navigate through the environment as traditional distance sensors usually fail because of the continuous perturbation due to the motion of the robot. Another challenge is maintaining the continuous dynamic stability of the robot while walking, which requires complicated and state-of-the-art control algorithms. This paper presents a thorough description of the hardware design and control architecture of our in-house prismatic joint quadruped robot called the PRISMA. We aim to forge a robust and kinematically stable quadruped robot that can use elementary control algorithms and utilize conventional sensors to navigate an unknown environment. We discuss the benefits and limitations of the robot in terms of its motion, different foot trajectories, manufacturability, and controls.