 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn overcome of far-distance limitation on tunnel CCTV-based accident detection in AI deep-learning frameworks
Jul 22, 2021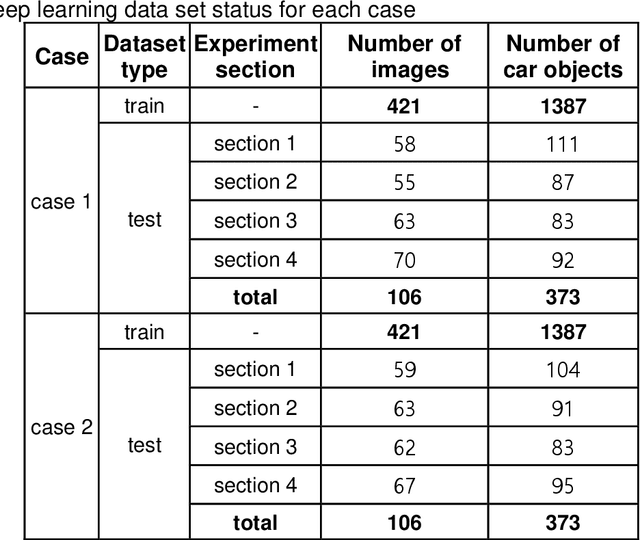
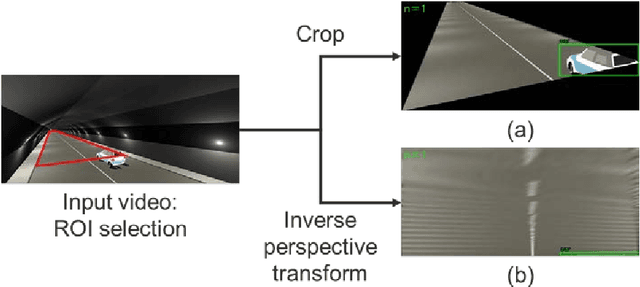
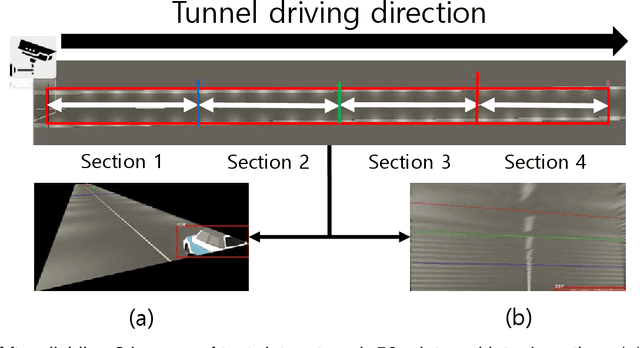
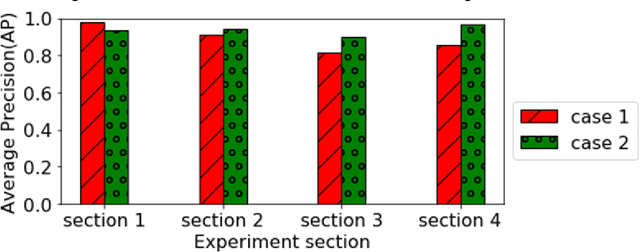
Tunnel CCTVs are installed to low height and long-distance interval. However, because of the limitation of installation height, severe perspective effect in distance occurs, and it is almost impossible to detect vehicles in far distance from the CCTV in the existing tunnel CCTV-based accident detection system (Pflugfelder 2005). To overcome the limitation, a vehicle object is detected through an object detection algorithm based on an inverse perspective transform by re-setting the region of interest (ROI). It can detect vehicles that are far away from the CCTV. To verify this process, this paper creates each dataset consisting of images and bounding boxes based on the original and warped images of the CCTV at the same time, and then compares performance of the deep learning object detection models trained with the two datasets. As a result, the model that trained the warped image was able to detect vehicle objects more accurately at the position far from the CCTV compared to the model that trained the original image.
An application of a deep learning algorithm for automatic detection of unexpected accidents under bad CCTV monitoring conditions in tunnels
Oct 11, 2019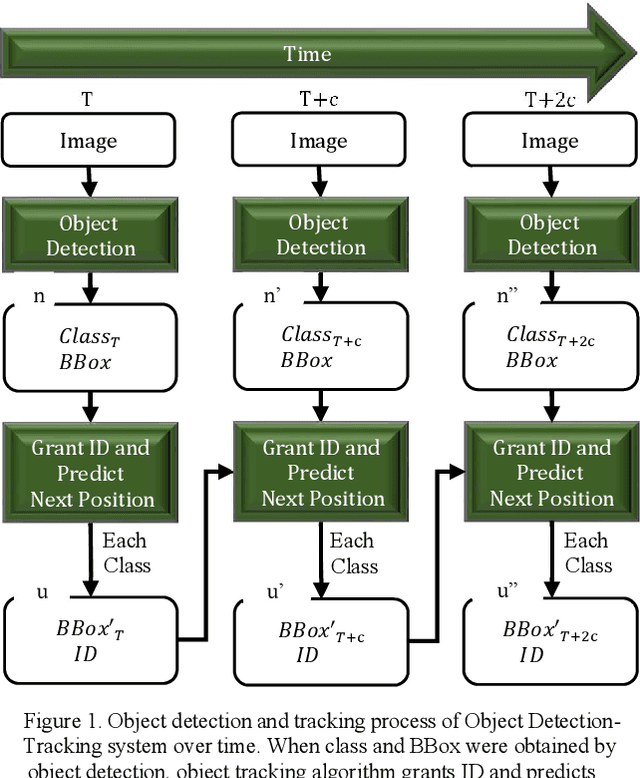
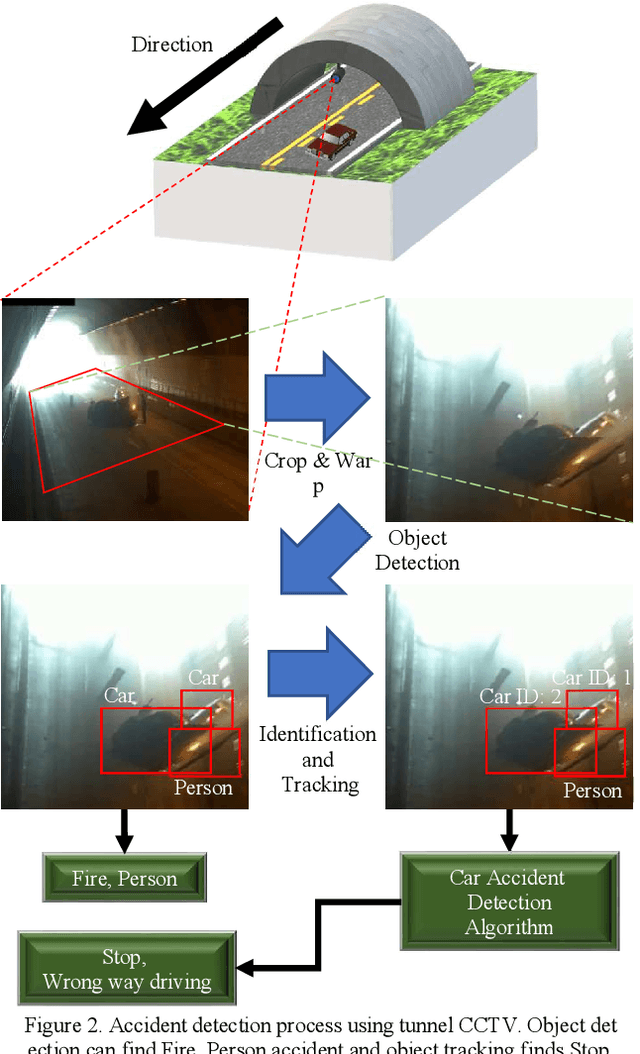
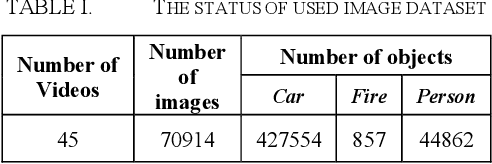
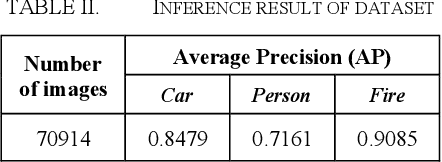
In this paper, Object Detection and Tracking System (ODTS) in combination with a well-known deep learning network, Faster Regional Convolution Neural Network (Faster R-CNN), for Object Detection and Conventional Object Tracking algorithm will be introduced and applied for automatic detection and monitoring of unexpected events on CCTVs in tunnels, which are likely to (1) Wrong-Way Driving (WWD), (2) Stop, (3) Person out of vehicle in tunnel (4) Fire. ODTS accepts a video frame in time as an input to obtain Bounding Box (BBox) results by Object Detection and compares the BBoxs of the current and previous video frames to assign a unique ID number to each moving and detected object. This system makes it possible to track a moving object in time, which is not usual to be achieved in conventional object detection frameworks. A deep learning model in ODTS was trained with a dataset of event images in tunnels to Average Precision (AP) values of 0.8479, 0.7161 and 0.9085 for target objects: Car, Person, and Fire, respectively. Then, based on trained deep learning model, the ODTS based Tunnel CCTV Accident Detection System was tested using four accident videos which including each accident. As a result, the system can detect all accidents within 10 seconds. The more important point is that the detection capacity of ODTS could be enhanced automatically without any changes in the program codes as the training dataset becomes rich.
* 10 pages, 5 figures, 2019 International Conference on Deep Learning and Machine Learning in Emerging Applications (Deep-ML)
Self-enhancement of automatic tunnel accident detection (TAD) on CCTV by AI deep-learning
Oct 11, 2019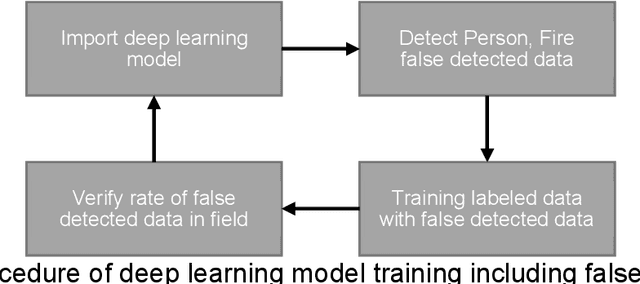
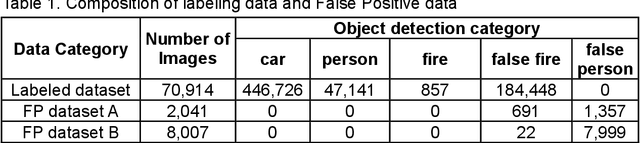
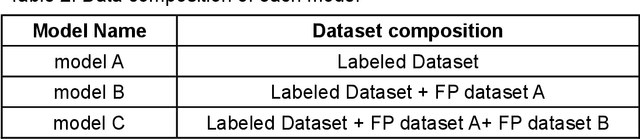
The deep-learning-based tunnel accident detection (TAD) system (Lee 2019) has installed a system capable of monitoring 9 CCTVs at XX site in November, 2018. The initial deep-learning training was started by studying 70,914 labeled images and label data. However, sunlight, the tail light of a vehicle, and the warning light of the working vehicle were recognized as a fire, and many pedestrians were detected in the lane of the tunnel or a black elongated black object. To solve these problems, as shown in Fig. 1, the false detection data detected in the field were trained with labeled data and reapplied in the field. As a result, false detection of pedestrians and fire could be significantly reduced.