 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeField Evaluations of A Deep Learning-based Intelligent Spraying Robot with Flow Control for Pear Orchards
Feb 15, 2021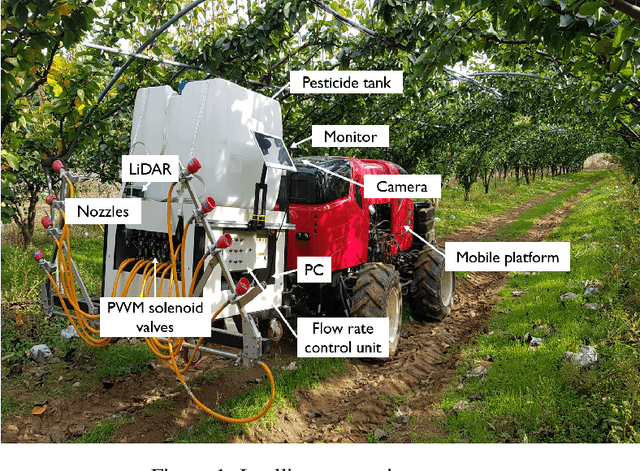

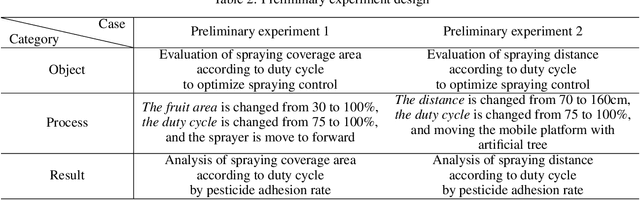
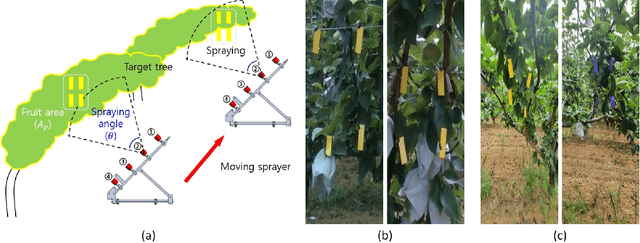
This paper proposes a variable flow control system in real time with deep learning using the segmentation of fruit trees in a pear orchard. The flow rate control in real time, undesired pressure fluctuation and theoretical modeling may differ from those in the real world. Therefore, two types of preliminary experiments were designed to examine the linear relationship of the flow rate modeling. Through a preliminary experiment, the parameters of the pulse width modulation (PWM) controller were optimized, and an actual field experiment was conducted to confirm the performance of the variable flow rate control system. As a result of the field experiment, the performance of the proposed system was satisfactory, as it showed that it could reduce pesticide use and the risk of pesticide exposure. Especially, since the field experiment was conducted in an unstructured environment, the proposed variable flow control system is expected to be sufficiently applicable to other orchards.
A Hybrid Systems-based Hierarchical Control Architecture for Heterogeneous Field Robot Teams
Feb 20, 2020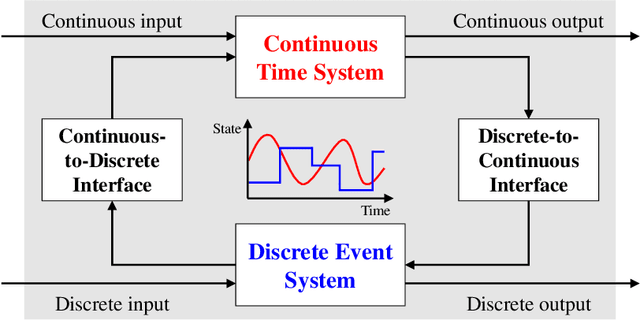
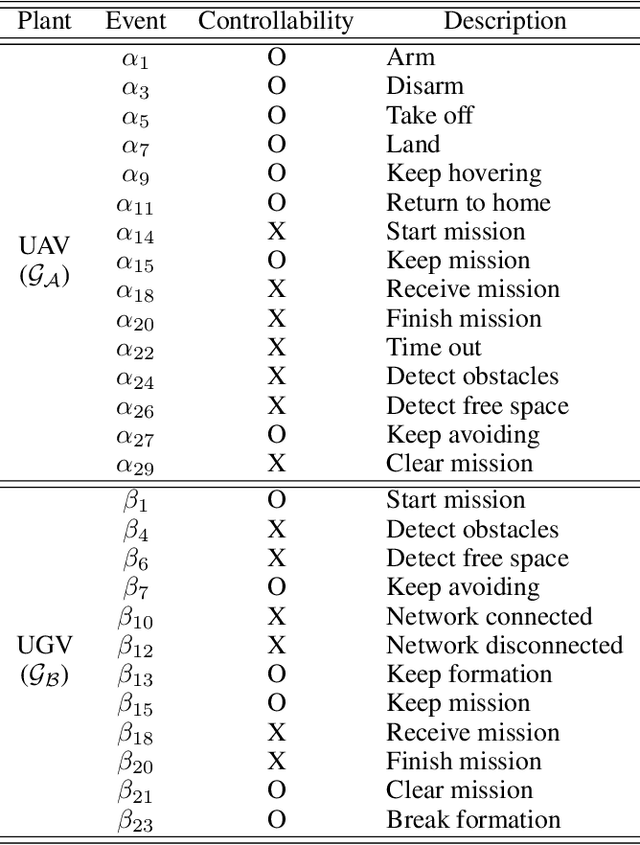
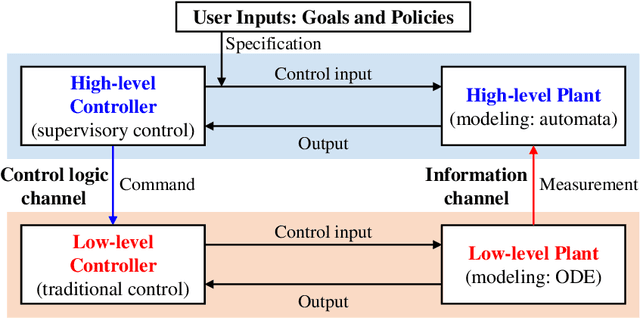
Field robot systems have recently been applied to a wide range of research fields. Making such systems more automated, advanced, and activated requires cooperation among heterogeneous robots. Classic control theory is inefficient in managing large-scale complex dynamic systems. Therefore, the supervisory control theory based on discrete event system needs to be introduced to overcome this limitation. In this study, we propose a hybrid systems-based hierarchical control architecture through a supervisory control-based high-level controller and a traditional control-based low-level controller. The hybrid systems and its dynamics are modeled through a formal method called hybrid automata, and the behavior specifications expressing the control objectives for cooperation are designed. Additionally, a modular supervisor that is more scalable and maintainable than a centralized supervisory controller was synthesized. The proposed hybrid systems and hierarchical control architecture were implemented, validated, and then evaluated for performance through the physics-based simulator. Experimental results confirmed that the heterogeneous field robot team satisfied the given specifications and presented systematic results, validating the efficiency of the proposed control architecture.