 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin Driven Textile Classification and Foreign Object Recognition in Automated Sorting Systems
Mar 05, 2026The increasing demand for sustainable textile recycling requires robust automation solutions capable of handling deformable garments and detecting foreign objects in cluttered environments. This work presents a digital twin driven robotic sorting system that integrates grasp prediction, multi modal perception, and semantic reasoning for real world textile classification. A dual arm robotic cell equipped with RGBD sensing, capacitive tactile feedback, and collision-aware motion planning autonomously separates garments from an unsorted basket, transfers them to an inspection zone, and classifies them using state of the art Visual Language Models (VLMs). We benchmark nine VLM s from five model families on a dataset of 223 inspection scenarios comprising shirts, socks, trousers, underwear, foreign objects (including garments outside of the aforementioned classes), and empty scenes. The evaluation assesses per class accuracy, hallucination behavior, and computational performance under practical hardware constraints. Results show that the Qwen model family achieves the highest overall accuracy (up to 87.9 %), with strong foreign object detection performance, while lighter models such as Gemma3 offer competitive speed accuracy trade offs for edge deployment. A digital twin combined with MoveIt enables collision aware path planning and integrates segmented 3D point clouds of inspected garments into the virtual environment for improved manipulation reliability. The presented system demonstrates the feasibility of combining semantic VLM reasoning with conventional grasp detection and digital twin technology for scalable, autonomous textile sorting in realistic industrial settings.
Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Aug 17, 2021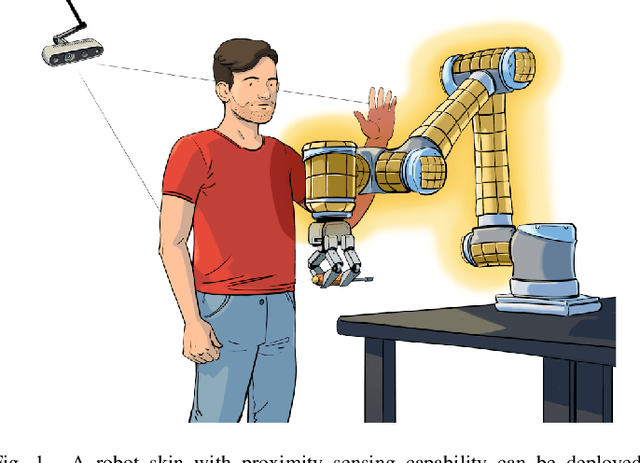
Proximity perception is a technology that has the potential to play an essential role in the future of robotics. It can fulfill the promise of safe, robust, and autonomous systems in industry and everyday life, alongside humans, as well as in remote locations in space and underwater. In this survey paper, we cover the developments of this field from the early days up to the present, with a focus on human-centered robotics. Here, proximity sensors are typically deployed in two scenarios: first, on the exterior of manipulator arms to support safety and interaction functionality, and second, on the inside of grippers or hands to support grasping and exploration. Starting from this observation, we propose a categorization for the approaches found in the literature. To provide a basis for understanding these approaches, we devote effort to present the technologies and different measuring principles that were developed over the years, also providing a summary in form of a table. Then, we show the diversity of applications that have been presented in the literature. Finally, we give an overview of the most important trends that will shape the future of this domain.