 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePosition-Based Flocking for Persistent Alignment without Velocity Sensing
Feb 25, 2026Coordinated collective motion in bird flocks and fish schools inspires algorithms for cohesive swarm robotics. This paper presents a position-based flocking model that achieves persistent velocity alignment without velocity sensing. By approximating relative velocity differences from changes between current and initial relative positions and incorporating a time- and density-dependent alignment gain with a non-zero minimum threshold to maintain persistent alignment, the model sustains coherent collective motion over extended periods. Simulations with a collective of 50 agents demonstrate that the position-based flocking model attains faster and more sustained directional alignment and results in more compact formations than a velocity-alignment-based baseline. This position-based flocking model is particularly well-suited for real-world robotic swarms, where velocity measurements are unreliable, noisy, or unavailable. Experimental results using a team of nine real wheeled mobile robots are also presented.
FDA Flocking: Future Direction-Aware Flocking via Velocity Prediction
Feb 03, 2026Understanding self-organization in natural collectives such as bird flocks inspires swarm robotics, yet most flocking models remain reactive, overlooking anticipatory cues that enhance coordination. Motivated by avian postural and wingbeat signals, as well as multirotor attitude tilts that precede directional changes, this work introduces a principled, bio-inspired anticipatory augmentation of reactive flocking termed Future Direction-Aware (FDA) flocking. In the proposed framework, agents blend reactive alignment with a predictive term based on short-term estimates of neighbors' future velocities, regulated by a tunable blending parameter that interpolates between reactive and anticipatory behaviors. This predictive structure enhances velocity consensus and cohesion-separation balance while mitigating the adverse effects of sensing and communication delays and measurement noise that destabilize reactive baselines. Simulation results demonstrate that FDA achieves faster and higher alignment, enhanced translational displacement of the flock, and improved robustness to delays and noise compared to a purely reactive model. Future work will investigate adaptive blending strategies, weighted prediction schemes, and experimental validation on multirotor drone swarms.
A Minimal Model for Emergent Collective Behaviors in Autonomous Robotic Multi-Agent Systems
Aug 13, 2025Collective behaviors such as swarming and flocking emerge from simple, decentralized interactions in biological systems. Existing models, such as Vicsek and Cucker-Smale, lack collision avoidance, whereas the Olfati-Saber model imposes rigid formations, limiting their applicability in swarm robotics. To address these limitations, this paper proposes a minimal yet expressive model that governs agent dynamics using relative positions, velocities, and local density, modulated by two tunable parameters: the spatial offset and kinetic offset. The model achieves spatially flexible, collision-free behaviors that reflect naturalistic group dynamics. Furthermore, we extend the framework to cognitive autonomous systems, enabling energy-aware phase transitions between swarming and flocking through adaptive control parameter tuning. This cognitively inspired approach offers a robust foundation for real-world applications in multi-robot systems, particularly autonomous aerial swarms.
Distributed Receding Horizon Control of Autonomous Convoy with Self-Interested Vehicles
Jan 21, 2021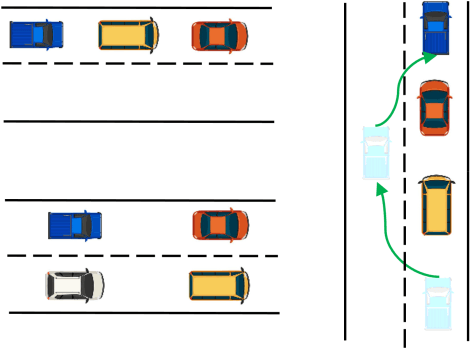


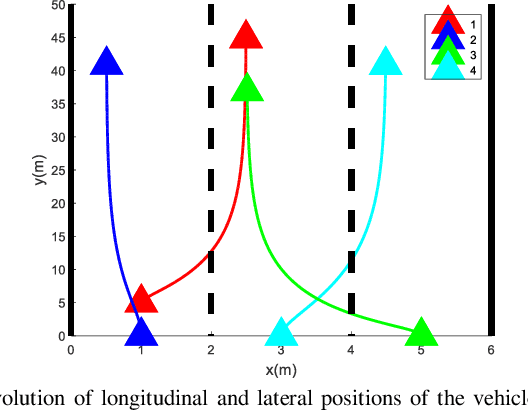
This paper considers the problem of controlling a convoy of autonomous vehicles to be deployed on automated highways. The individual behavior of an autonomous vehicle as an intelligent self-interested decision-maker can be analyzed under a non-cooperative differential game model of the convoy. The receding horizon Nash equilibrium of the linear-quadratic differential game provides a distributed state-feedback control strategy for the convoy. This approach suffers a fundamental issue that neither the existence nor the uniqueness of a Nash equilibrium is guaranteed, so the convoy control. We present a relative dynamics based model of the convoy that carries all the features of the individual dynamics based game model. We show that the relative dynamics model guarantees the existence of the convoy control as well as the asymptotic stability of the closed-loop system. Simulations illustrate the effectiveness of the presented convoy control scheme.