 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR2D-RL: A RoboCup 2D Soccer Environment for Multi-Agent Reinforcement Learning
Jun 17, 2026Robot soccer is a challenging testbed for multi-agent reinforcement learning because it combines partial observability, cooperative and adversarial interaction, sparse rewards, and long-horizon tactical behavior. RoboCup 2D Soccer Simulation (RCSS2D) provides a mature robot-soccer platform, but its competition-oriented server-client architecture is difficult to use directly with modern Python-based MARL workflows. We introduce R2D-RL, a reinforcement learning environment that connects RCSS2D and HELIOS-based player clients to a Python MARL interface through shared-memory communication and cycle-level synchronization. R2D-RL supports full-field and scenario-based training with configurable opponents, Base discrete and Hybrid parameterized action spaces, action masks, expected possession value (EPV)-based reward shaping, and parallel execution. We provide front-goal scenarios and an 11-vs-11 full-field benchmark, together with baseline results.
Selecting the Best Player Formation for Corner-Kick Situations Based on Bayes' Estimation
Jun 03, 2016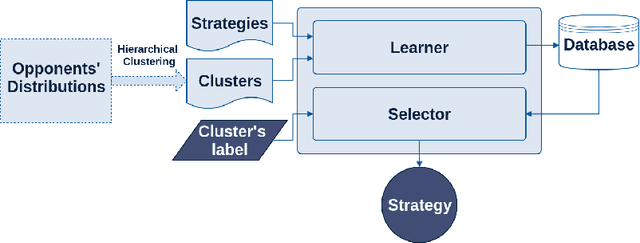
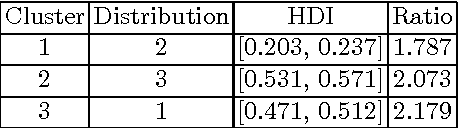
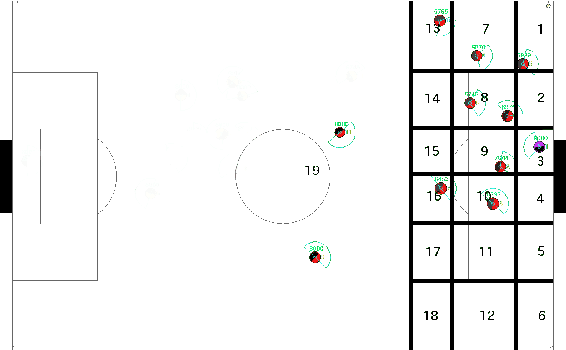

In the domain of the Soccer simulation 2D league of the RoboCup project, appropriate player positioning against a given opponent team is an important factor of soccer team performance. This work proposes a model which decides the strategy that should be applied regarding a particular opponent team. This task can be realized by applying preliminary a learning phase where the model determines the most effective strategies against clusters of opponent teams. The model determines the best strategies by using sequential Bayes' estimators. As a first trial of the system, the proposed model is used to determine the association of player formations against opponent teams in the particular situation of corner-kick. The implemented model shows satisfying abilities to compare player formations that are similar to each other in terms of performance and determines the right ranking even by running a decent number of simulation games.