 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed nonlinear model predictive control of an autonomous tractor-trailer system
Apr 20, 2021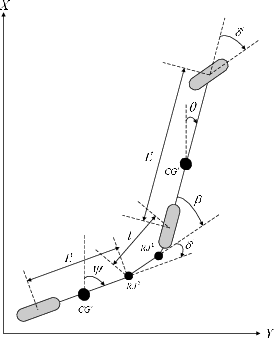
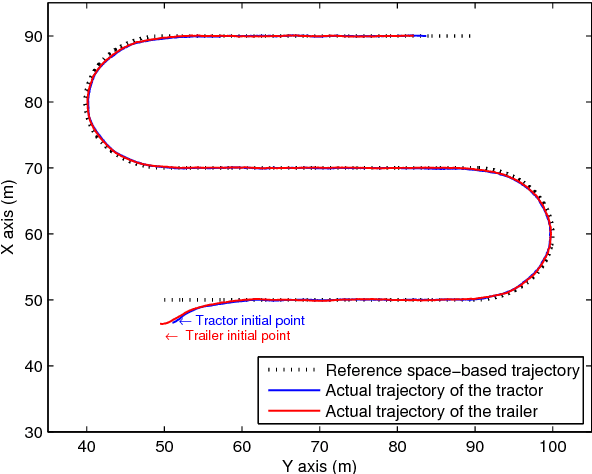
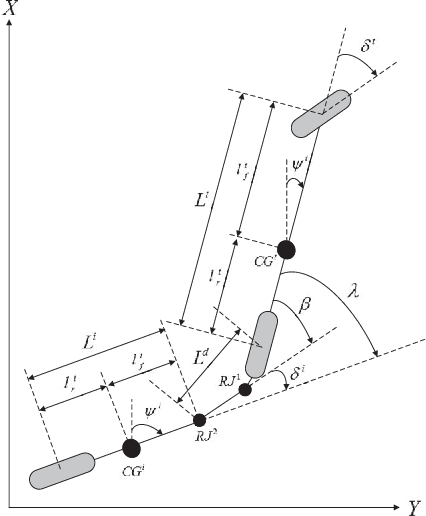
This paper addresses the trajectory tracking problem of an autonomous tractor-trailer system by using a fast distributed nonlinear model predictive control algorithm in combination with nonlinear moving horizon estimation for the state and parameter estimation in which constraints on the inputs and the states can be incorporated. The proposed control algorithm is capable of driving the tractor-trailer system to any desired trajectory ensuring high control accuracy and robustness against environmental disturbances.
* arXiv admin note: substantial text overlap with arXiv:2104.02063, arXiv:2104.01728
Adaptive Neuro-Fuzzy Control of a Spherical Rolling Robot Using Sliding-Mode-Control-Theory-Based Online Learning Algorithm
Apr 14, 2021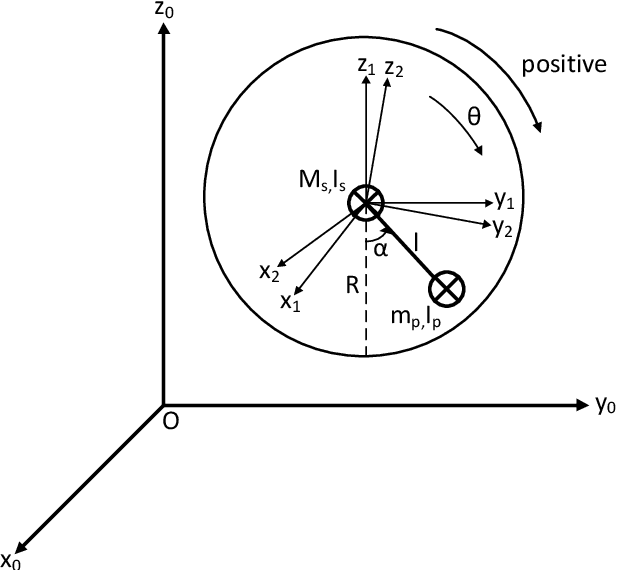
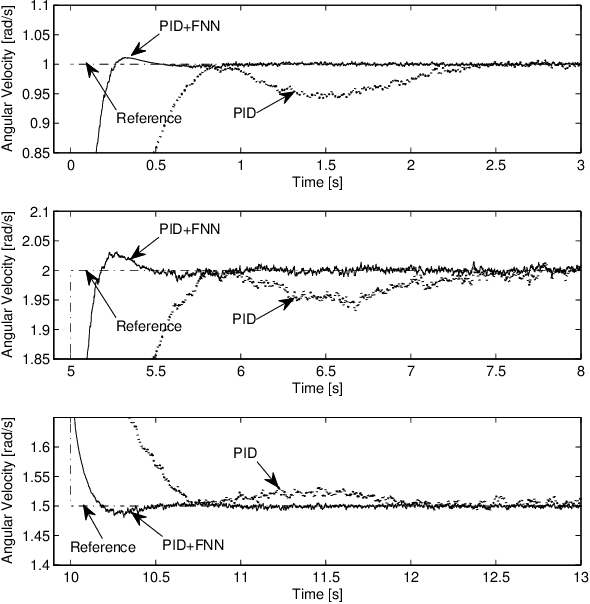
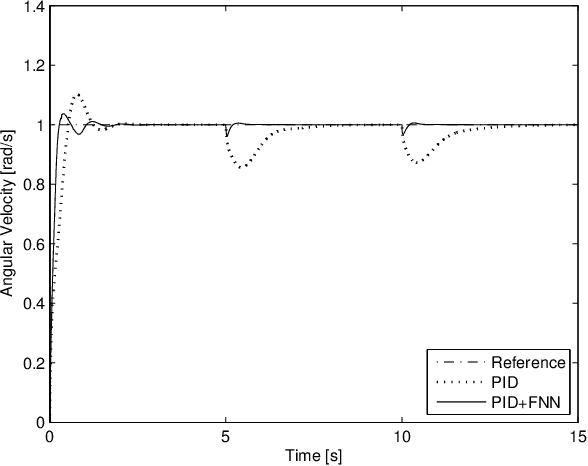
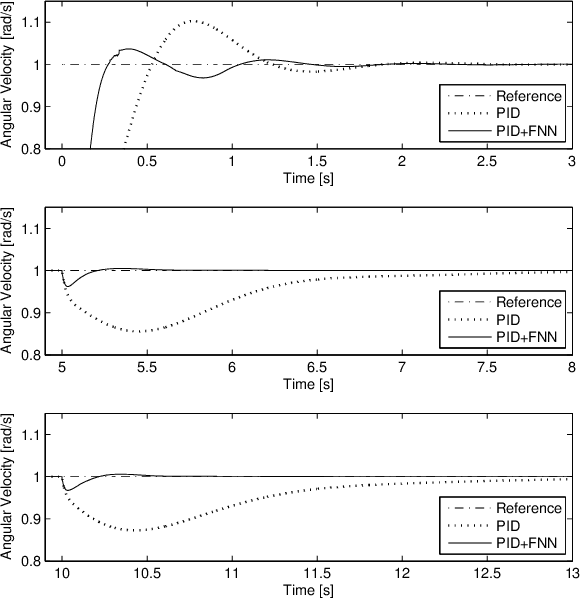
As a model is only an abstraction of the real system, unmodeled dynamics, parameter variations, and disturbances can result in poor performance of a conventional controller based on this model. In such cases, a conventional controller cannot remain well tuned. This paper presents the control of a spherical rolling robot by using an adaptive neuro-fuzzy controller in combination with a sliding-mode control (SMC)-theory-based learning algorithm. The proposed control structure consists of a neuro-fuzzy network and a conventional controller which is used to guarantee the asymptotic stability of the system in a compact space. The parameter updating rules of the neuro-fuzzy system using SMC theory are derived, and the stability of the learning is proven using a Lyapunov function. The simulation results show that the control scheme with the proposed SMC-theory-based learning algorithm is able to not only eliminate the steady-state error but also improve the transient response performance of the spherical rolling robot without knowing its dynamic equations.
Towards agrobots: Identification of the yaw dynamics and trajectory tracking of an autonomous tractor
Apr 14, 2021
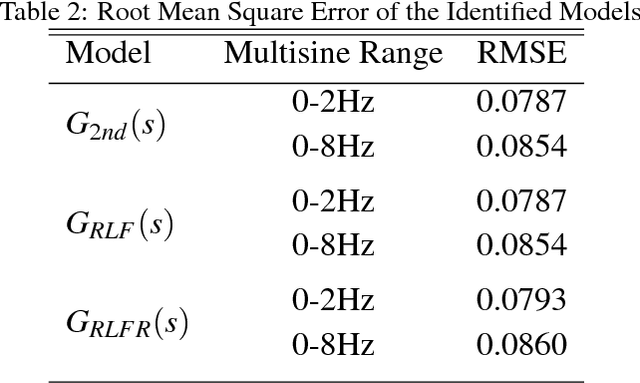
More efficient agricultural machinery is needed as agricultural areas become more limited and energy and labor costs increase. To increase their efficiency, trajectory tracking problem of an autonomous tractor, as an agricultural production machine, has been investigated in this study. As a widely used model-based approach, model predictive control is preferred in this paper to control the yaw dynamics of the tractor which can deal with the constraints on the states and the actuators in a system. The yaw dynamics is identified by using nonlinear least squares frequency domain system identification. The speed is controlled by a proportional-integral-derivative controller and a kinematic trajectory controller is used to calculate the desired speed and the desired yaw rate signals for the subsystems in order to minimize the tracking errors in both the longitudinal and transversal directions. The experimental results show the accuracy and the efficiency of the proposed control scheme in which the euclidean error is below $40$ cm for time-based straight line trajectories and $60$ cm for time-based curved line trajectories, respectively.
Towards Agrobots: Trajectory Control of an Autonomous Tractor Using Type-2 Fuzzy Logic Controllers
Apr 09, 2021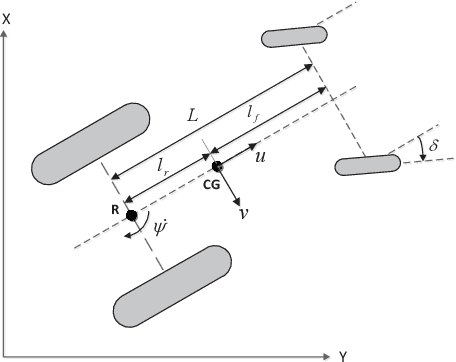
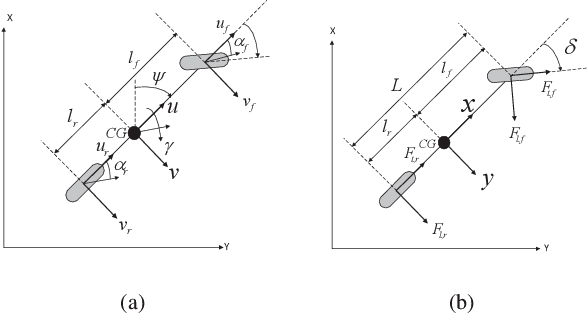
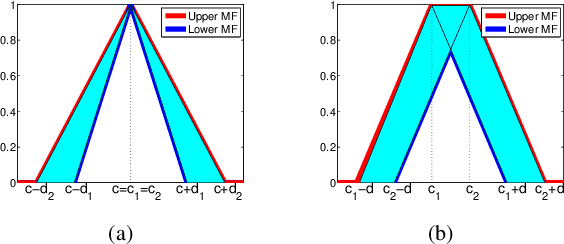
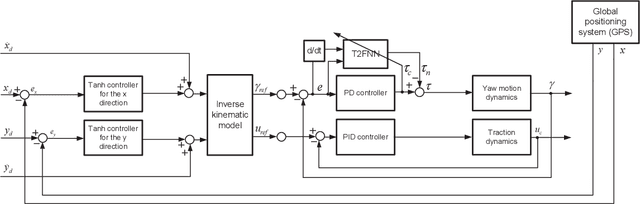
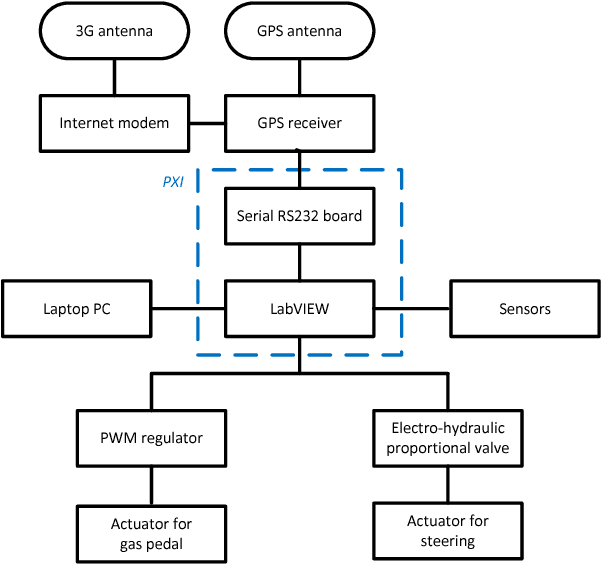
Provision of some autonomous functions to an agricultural vehicle would lighten the job of the operator but in doing so, the accuracy should not be lost to still obtain an optimal yield. Autonomous navigation of an agricultural vehicle involves the control of different dynamic subsystems, such as the yaw angle dynamics and the longitudinal speed dynamics. In this study, a proportional-integral-derivative controller is used to control the longitudinal velocity of the tractor. For the control of the yaw angle dynamics, a proportional-derivative controller works in parallel with a type-2 fuzzy neural network. In such an arrangement, the former ensures the stability of the related subsystem, while the latter learns the system dynamics and becomes the leading controller. In this way, instead of modeling the interactions between the subsystems prior to the design of model-based control, we develop a control algorithm which learns the interactions online from the measured feedback error. In addition to the control of the stated subsystems, a kinematic controller is needed to correct the errors in both the x- and the y- axis for the trajectory tracking problem of the tractor. To demonstrate the real-time abilities of the proposed control scheme, an autonomous tractor is equipped with the use of reasonably priced sensors and actuators. Experimental results show the efficacy and efficiency of the proposed learning algorithm.
Robust Tube-Based Decentralized Nonlinear Model Predictive Control of an Autonomous Tractor-Trailer System
Apr 05, 2021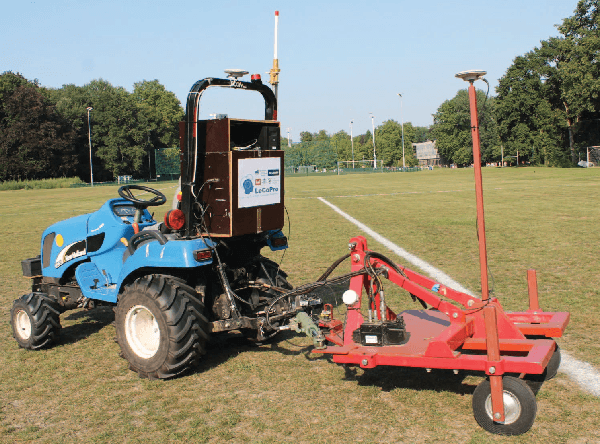
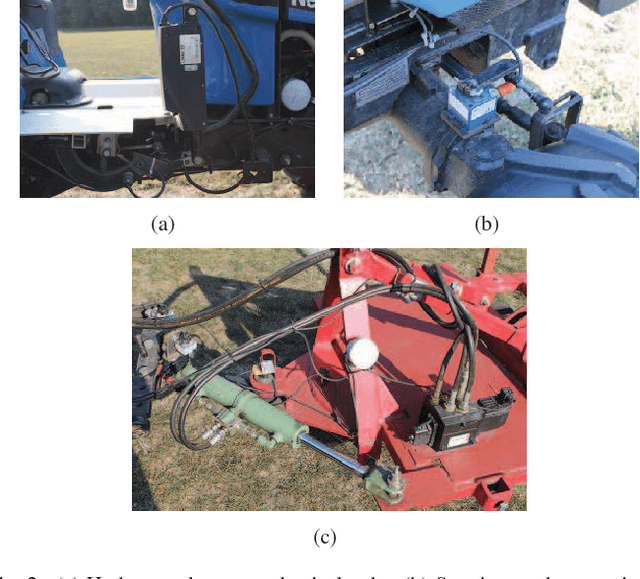
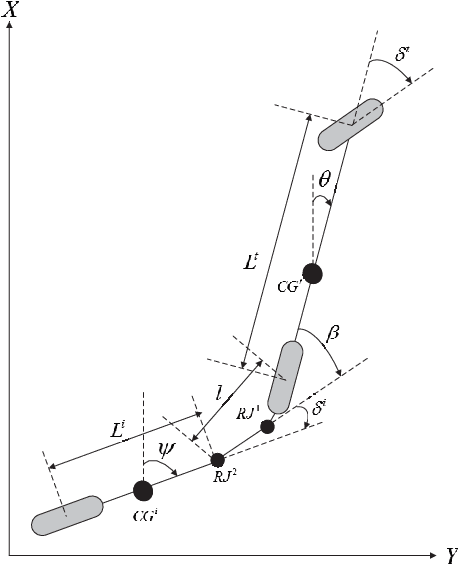
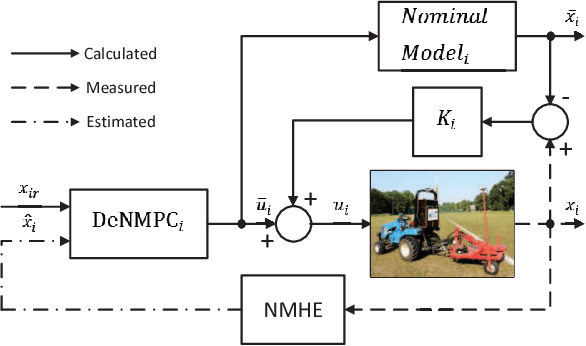
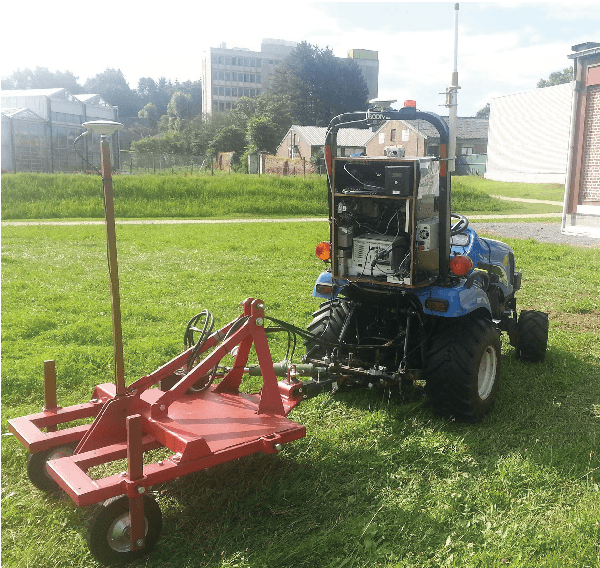
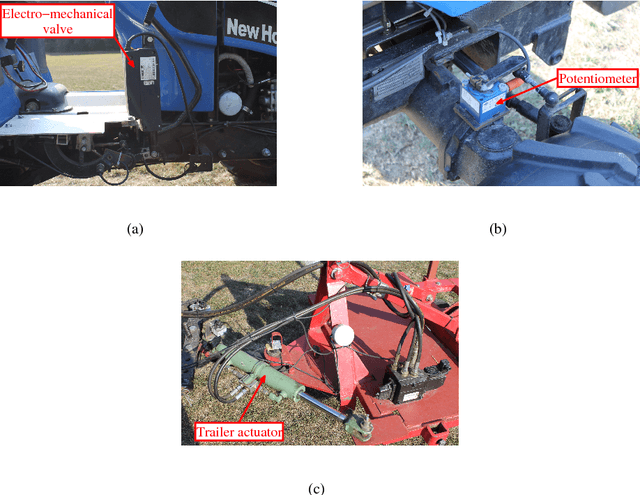
This paper addresses the trajectory tracking problem of an autonomous tractor-trailer system by using a decentralized control approach. A fully decentralized model predictive controller is designed in which interactions between subsystems are neglected and assumed to be perturbations to each other. In order to have a robust design, a tube-based approach is proposed to handle the differences between the nominal model and real system. Nonlinear moving horizon estimation is used for the state and parameter estimation after each new measurement, and the estimated values are fed to robust tube-based decentralized nonlinear model predictive controller. The proposed control scheme is capable of driving the tractor-trailer system to any desired trajectory ensuring high control accuracy and robustness against neglected subsystem interactions and environmental disturbances. The experimental results show an accurate trajectory tracking performance on a bumpy grass field.
* arXiv admin note: substantial text overlap with arXiv:2104.01728
Robust Trajectory Tracking Error Model-Based Predictive Control for Unmanned Ground Vehicles
Mar 31, 2021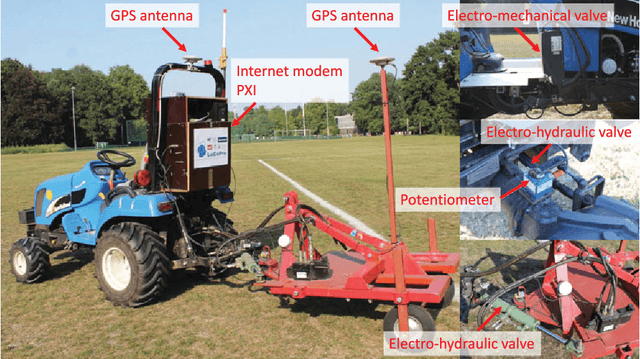
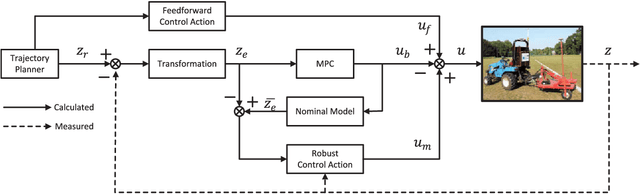
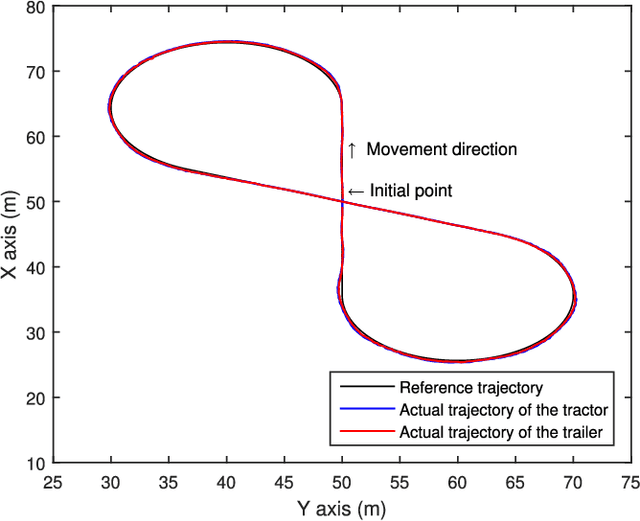
This paper proposes a new robust trajectory tracking error-based control approach for unmanned ground vehicles. A trajectory tracking error-based model is used to design a linear model predictive controller and its control action is combined with feedforward and robust control actions. The experimental results show that the proposed control structure is capable to let a tractor-trailer system track both linear and curvilinear target trajectories with low tracking error.
Experimental Validation of Linear and Nonlinear MPC on an Articulated Unmanned Ground Vehicle
Mar 25, 2021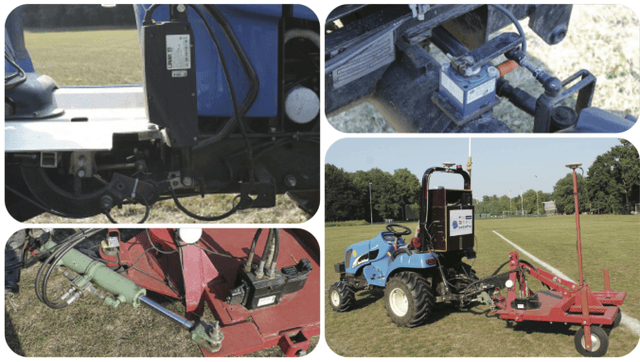
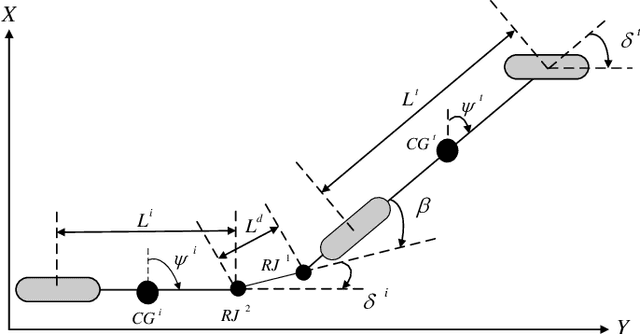
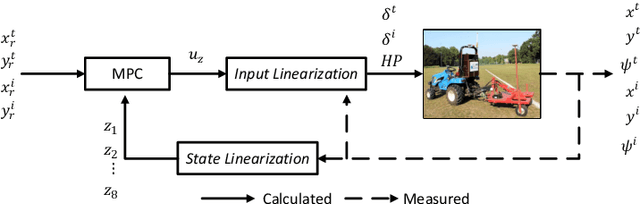
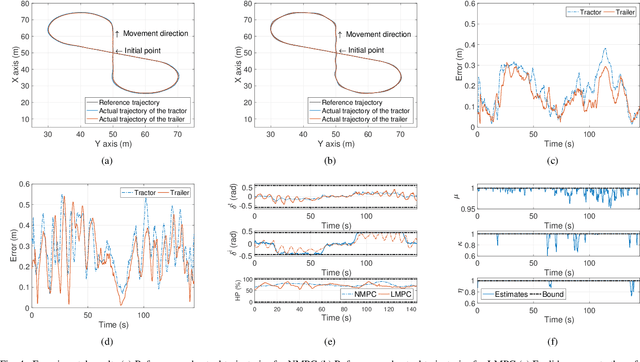
This paper focuses on the trajectory tracking control problem for an articulated unmanned ground vehicle. We propose and compare two approaches in terms of performance and computational complexity. The first uses a nonlinear mathematical model derived from first principles and combines a nonlinear model predictive controller (NMPC) with a nonlinear moving horizon estimator (NMHE) to produce a control strategy. The second is based on an input-state linearization (ISL) of the original model followed by linear model predictive control (LMPC). A fast real-time iteration scheme is proposed, implemented for the NMHE-NMPC framework and benchmarked against the ISL-LMPC framework, which is a traditional and cheap method. The experimental results for a time-based trajectory show that the NMHE-NMPC framework with the proposed real-time iteration scheme gives better trajectory tracking performance than the ISL-LMPC framework and the required computation time is feasible for real-time applications. Moreover, the ISL-LMPC produces results of a quality comparable to the NMHE-NMPC framework at a significantly reduced computational cost.