 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Physical Imitation Learning Pipeline for Energy-Efficient Quadruped Locomotion Assisted by Parallel Elastic Joint
Apr 01, 2026Due to brain-body co-evolution, animals' intrinsic body dynamics play a crucial role in energy-efficient locomotion, which shares control effort between active muscles and passive body dynamics -- a principle known as Embodied Physical Intelligence. In contrast, robot bodies are often designed with one centralised controller that typically suppress the intrinsic body dynamics instead of exploiting it. We introduce Physical Imitation Learning (PIL), which distils a Reinforcement Learning (RL) control policy into physically implementable body responses that can be directly offloaded to passive Parallel Elastic Joints (PEJs), enabling therefore the body to imitate part of the controlled behaviour. Meanwhile, the residual policy commands the motors to recover the RL policy's performance. The results is an overall reduced energy consumption thanks to outsourcing parts of the control policy to the PEJs. Here we show in simulated quadrupeds, that our PIL approach can offloads up to 87% of mechanical power to PEJs on flat terrain and 18% on rough terrain. Because the body design is distilled from -- rather than jointly optimised with -- the control policy, PIL realises brain-body co-design without expanding the search space with body design parameters, providing a computationally efficient route to task-specific Embodied Physical Intelligence applicable to a wide range of joint-based robot morphologies.
Bodily aware soft robots: integration of proprioceptive and exteroceptive sensors
Nov 08, 2017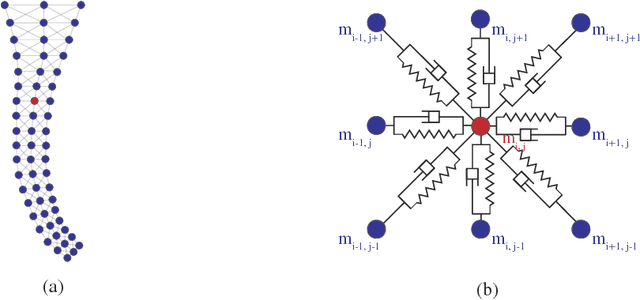
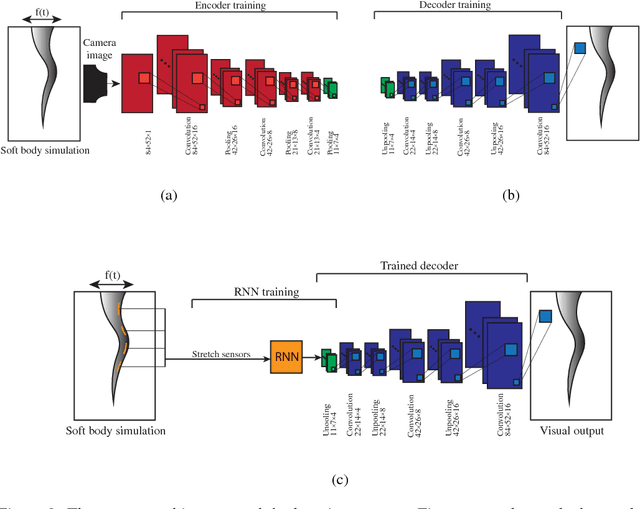
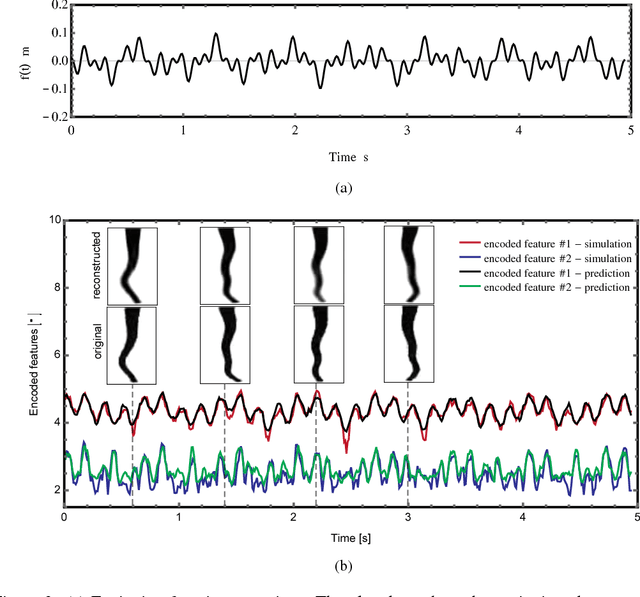
Being aware of our body has great importance in our everyday life. This is the reason why we know how to move in a dark room or to grasp a complex object. These skills are important for robots as well, however, robotic bodily awareness is still an unsolved problem. In this paper we present a novel method to implement bodily awareness in soft robots by the integration of exteroceptive and proprioceptive sensors. We use a combination of a stacked convolutional autoencoder and a recurrent neural network to map internal sensory signals to visual information. As a result, the simulated soft robot can learn to \textit{imagine} its motion even when its visual sensor is not available.