 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Location Estimation in the Situation Calculus
Feb 28, 2014
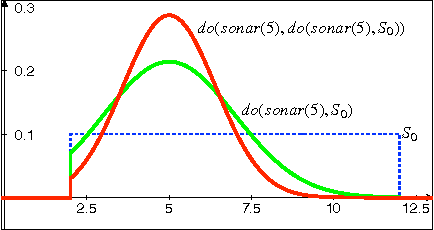
Location estimation is a fundamental sensing task in robotic applications, where the world is uncertain, and sensors and effectors are noisy. Most systems make various assumptions about the dependencies between state variables, and especially about how these dependencies change as a result of actions. Building on a general framework by Bacchus, Halpern and Levesque for reasoning about degrees of belief in the situation calculus, and a recent extension to it for continuous domains, in this paper we illustrate location estimation in the presence of a rich theory of actions using an example. We also show that while actions might affect prior distributions in nonstandard ways, suitable posterior beliefs are nonetheless entailed as a side-effect of the overall specification.
Reasoning about Probabilities in Dynamic Systems using Goal Regression
Sep 26, 2013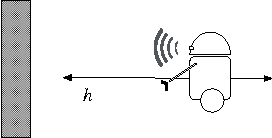
Reasoning about degrees of belief in uncertain dynamic worlds is fundamental to many applications, such as robotics and planning, where actions modify state properties and sensors provide measurements, both of which are prone to noise. With the exception of limited cases such as Gaussian processes over linear phenomena, belief state evolution can be complex and hard to reason with in a general way. This paper proposes a framework with new results that allows the reduction of subjective probabilities after sensing and acting to questions about the initial state only. We build on an expressive probabilistic first-order logical account by Bacchus, Halpern and Levesque, resulting in a methodology that, in principle, can be coupled with a variety of existing inference solutions.