 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape and Color Object Tracking for Real-Time Robotic Navigation
Oct 15, 2014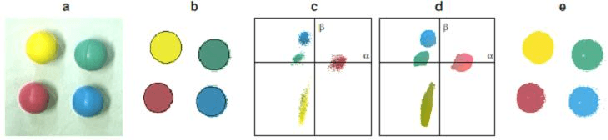

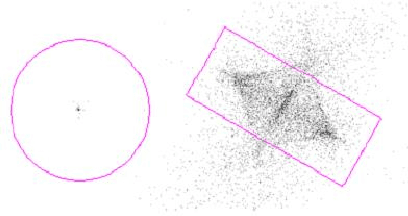

This paper presents a real-time approach for single-colored ball detection and tracking. The approach consists of two main phases. In a first offline calibration phase, the intrinsic parameters of the camera and the radial distortion are estimated, and a classification of colors is learned from a sample image of colored balls. The second phase consists of four main steps: (1) color segmentation of the input image into several regions based on the offline classification, (2) robust estimation of the circle parameters (3) refinement of the circle parameters, and (4) ball tracking. The experimental results showed that the approach presents a good compromise between suitability for real-time navigation and robustness to occlusions, background congestion and colors interference in the scene.
Genetic Stereo Matching Algorithm with Fuzzy Fitness
Oct 09, 2014



This paper presents a genetic stereo matching algorithm with fuzzy evaluation function. The proposed algorithm presents a new encoding scheme in which a chromosome is represented by a disparity matrix. Evolution is controlled by a fuzzy fitness function able to deal with noise and uncertain camera measurements, and uses classical evolutionary operators. The result of the algorithm is accurate dense disparity maps obtained in a reasonable computational time suitable for real-time applications as shown in experimental results.