 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironment-Aware and Human-Cooperative Swing Control for Lower-Limb Prostheses in Diverse Obstacle Scenarios
Jul 01, 2025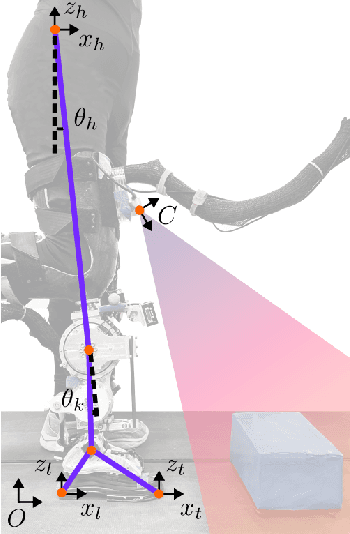



Current control strategies for powered lower limb prostheses often lack awareness of the environment and the user's intended interactions with it. This limitation becomes particularly apparent in complex terrains. Obstacle negotiation, a critical scenario exemplifying such challenges, requires both real-time perception of obstacle geometry and responsiveness to user intention about when and where to step over or onto, to dynamically adjust swing trajectories. We propose a novel control strategy that fuses environmental awareness and human cooperativeness: an on-board depth camera detects obstacles ahead of swing phase, prompting an elevated early-swing trajectory to ensure clearance, while late-swing control defers to natural biomechanical cues from the user. This approach enables intuitive stepping strategies without requiring unnatural movement patterns. Experiments with three non-amputee participants demonstrated 100 percent success across more than 150 step-overs and 30 step-ons with randomly placed obstacles of varying heights (4-16 cm) and distances (15-70 cm). By effectively addressing obstacle navigation -- a gateway challenge for complex terrain mobility -- our system demonstrates adaptability to both environmental constraints and user intentions, with promising applications across diverse locomotion scenarios.