 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiency Optimization of a Two-link Planar Robotic Arm
Oct 28, 2024Energy consumption optimization of a two-link planar robotic arm is considered with the system's efficiency being the target for optimization. A new formulation of thermodynamic principles within the framework of dynamical systems is used. This approach is applied by considering cyclic motions for the robotic arm and analyzing the cyclic averaged energies while the robotic arm is tasked with going from point A to point B in the task space while resisting an external force. The energy transfer rate between the links is classified into positive and negative and the results combined with the averaged energy quantities, are used to address the optimization problem while adhering to the constraints imposed by the second law of thermodynamics in its new formulation.
Targeted Muscle Effort Distribution with Exercise Robots: Trajectory and Resistance Effects
Jul 02, 2021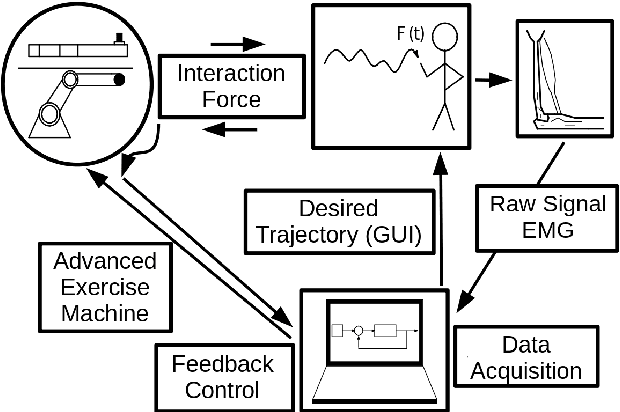
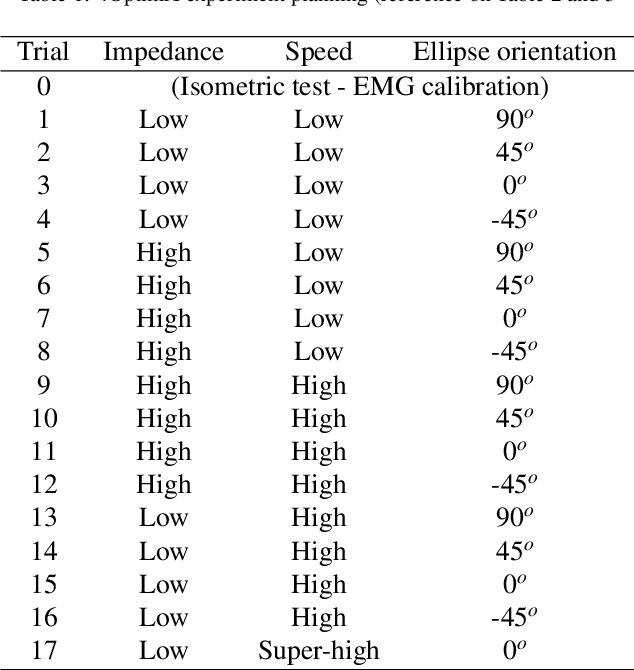
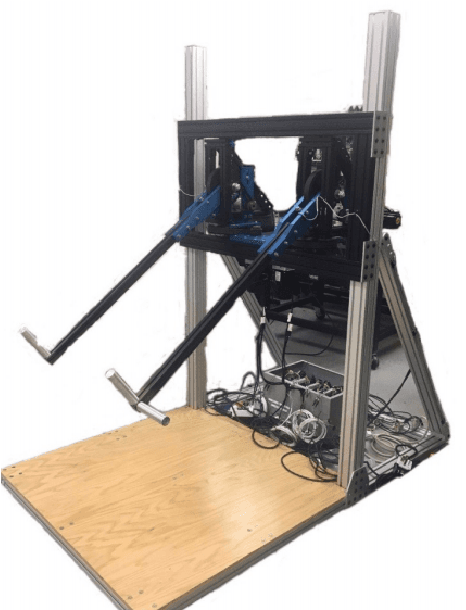
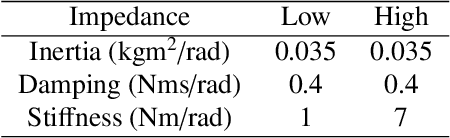
The objective of this work is to relate muscle effort distributions to the trajectory and resistance settings of a robotic exercise and rehabilitation machine. Muscular effort distribution, representing the participation of each muscle in the training activity, was measured with electromyography sensors (EMG) and defined as the individual activation divided by the total muscle group activation. A four degrees-of-freedom robot and its impedance control system are used to create advanced exercise protocols whereby the user is asked to follow a path against the machine's neutral path and resistance. In this work, the robot establishes a zero-effort circular path, and the subject is asked to follow an elliptical trajectory. The control system produces a user-defined stiffness between the deviations from the neutral path and the torque applied by the subject. The trajectory and resistance settings used in the experiments were the orientation of the ellipse and a stiffness parameter. Multiple combinations of these parameters were used to measure their effects on the muscle effort distribution. An artificial neural network (ANN) used part of the data for training the model. Then, the accuracy of the model was evaluated using the rest of the data. The results show how the precision of the model is lost over time. These outcomes show the complexity of the muscle dynamics for long-term estimations suggesting the existence of time-varying dynamics possibly associated with fatigue.
Real-Time Trajectory Optimization in Robot-Assisted Exercise and Rehabilitation
Apr 22, 2021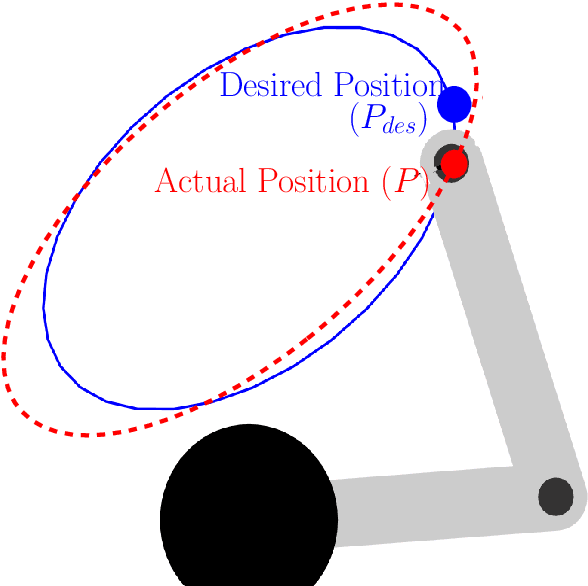
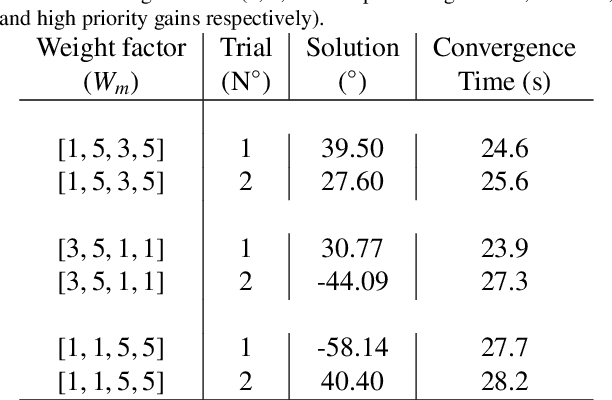
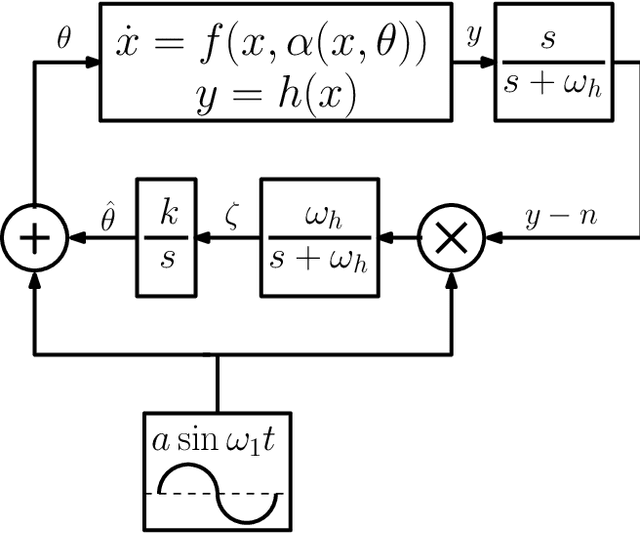
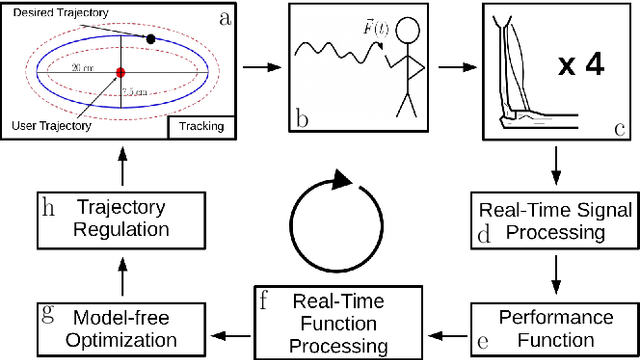
This work focuses on the optimization of the training trajectory orientation using a robot as an advanced exercise machine (AEM) and muscle activations as biofeedback. Muscle recruitment patterns depend on trajectory parameters of the AEMs and correlate with the efficiency of exercise. Thus, improvements to training efficiency may be achieved by optimizing these parameters. The optimal regulation of these parameters is challenging because of the complexity of the physiological dynamics from person to person as a result of the unique physical features such as musculoskeletal distribution. Furthermore, these effects can vary due to fatigue, body temperature, and other physiological factors. In this paper, a model-free optimization method using Extremum Seeking Control (ESC) as a real-time optimizer is proposed. After selecting a muscle objective, this method seeks for the optimal combination of parameters using the muscle activations as biofeedback. The muscle objective can be selected by a therapist to emphasize or de-emphasize certain muscle groups. The feasibility of this method has been proven for the automatic regulation of an ellipsoidal curve orientation, suggesting the existence of two local optimal orientations. This methodology can also be applied to other parameter regulations using a different physiological effects such as oxygen consumption and heart rate as biofeedback.
Backstepping Control of Muscle Driven Systems with Redundancy Resolution
Jun 01, 2020



Due to the several applications on Human-machine interaction (HMI), this area of research has become one of the most popular in recent years. This is the case for instance of advanced training machines, robots for rehabilitation, robotic surgeries and prosthesis. In order to ensure desirable performances, simulations are recommended before real-time experiments. These simulations have not been a problem in HMI on the side of the machine. However, the lack of controllers for human dynamic models suggests the existence of a gap for performing simulations for the human side. This paper offers to fulfill the previous gap by introducing a novel method based on a feedback controller for the dynamics of muscle-driven systems. The approach has been developed for trajectory tracking of systems with redundancy muscle resolution. To illustrate the validation of the method, a shoulder model actuated by a group of eight linkages, eight muscles and three degrees of freedom was used. The controller objective is to move the arm from a static position to another one through muscular activation. The results on this paper show the achievement of the arm movement, musculoskeletal dynamics and muscle activations.
Trajectory Optimization of Robots with Regenerative Drive Systems: Numerical and Experimental Results
Apr 01, 2018

We investigate energy-optimal control of robots with ultracapacitor based regenerative drive systems. Based on a previously introduced framework, a fairly generic model is considered for the robot and the drive system. An optimal control problem is formulated to find point-to point trajectories maximizing the amount of energy regenerated and stored in the capacitor. The optimization problem, its numerical solution and an experimental evaluation are demonstrated using a PUMA 560 manipulator. A comprehensive experimental setup was prepared to evaluate power flows and energy regeneration. Tracking of optimal trajectories was enforced on the robot using a standard robust passivity based control approach. Experimental results show that when following optimal trajectories, a reduction of about 13\% in energy consumption can be achieved for the conditions of the study.