 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining Anomalies with Tensor Networks
May 06, 2025Tensor networks, a class of variational quantum many-body wave functions have attracted considerable research interest across many disciplines, including classical machine learning. Recently, Aizpurua et al. demonstrated explainable anomaly detection with matrix product states on a discrete-valued cyber-security task, using quantum-inspired methods to gain insight into the learned model and detected anomalies. Here, we extend this framework to real-valued data domains. We furthermore introduce tree tensor networks for the task of explainable anomaly detection. We demonstrate these methods with three benchmark problems, show adequate predictive performance compared to several baseline models and both tensor network architectures' ability to explain anomalous samples. We thereby extend the application of tensor networks to a broader class of potential problems and open a pathway for future extensions to more complex tensor network architectures.
Quantum Deep Reinforcement Learning for Robot Navigation Tasks
Feb 24, 2022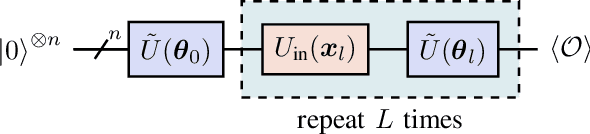
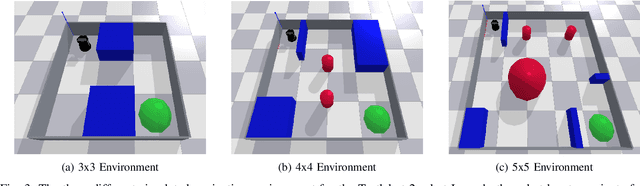


In this work, we utilize Quantum Deep Reinforcement Learning as method to learn navigation tasks for a simple, wheeled robot in three simulated environments of increasing complexity. We show similar performance of a parameterized quantum circuit trained with well established deep reinforcement learning techniques in a hybrid quantum-classical setup compared to a classical baseline. To our knowledge this is the first demonstration of quantum machine learning (QML) for robotic behaviors. Thus, we establish robotics as a viable field of study for QML algorithms and henceforth quantum computing and quantum machine learning as potential techniques for future advancements in autonomous robotics. Beyond that, we discuss current limitations of the presented approach as well as future research directions in the field of quantum machine learning for autonomous robots.