 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Manipulability of Interactive Lagrangian Systems
Jun 18, 2018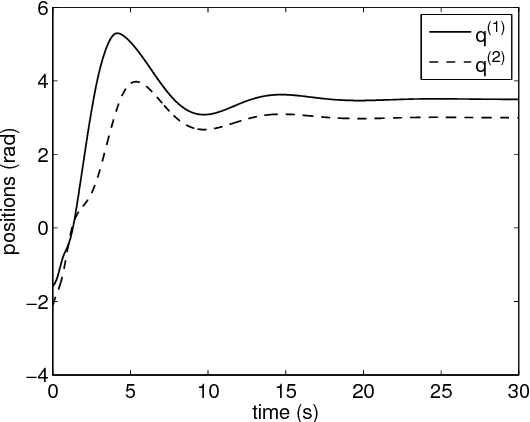
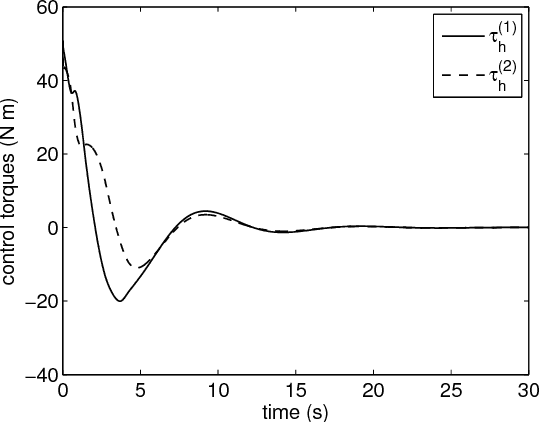
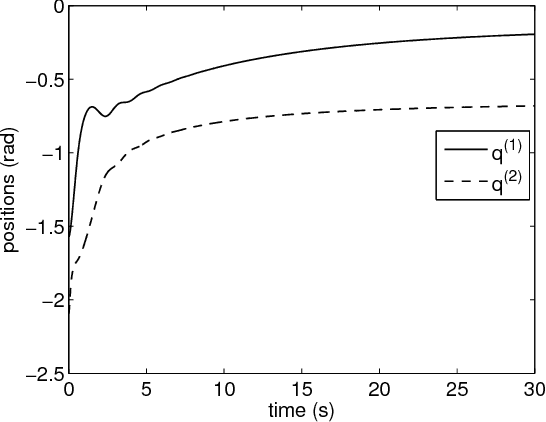
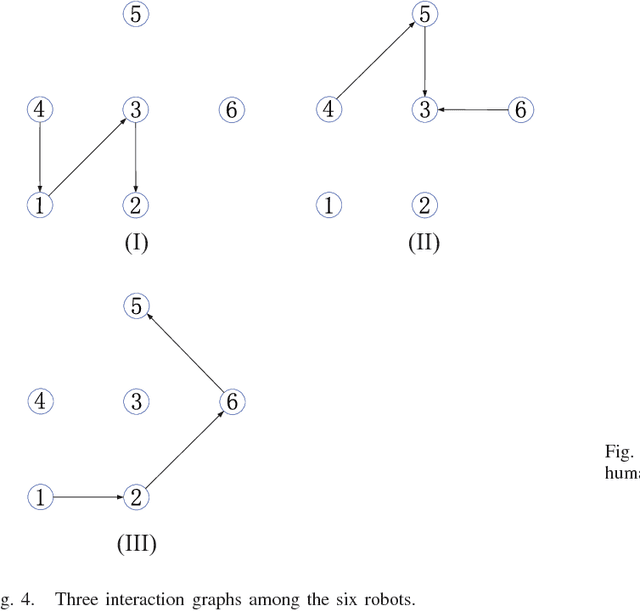
This paper investigates manipulability of interactive Lagrangian systems with parametric uncertainty and communication/sensing constraints. Two standard examples are teleoperation with a master-slave system and teaching operation of robots. We here systematically formulate the concept of infinite manipulability for general dynamical systems, and investigate how such a unified motivation yields a design paradigm towards guaranteeing the infinite manipulability of interactive dynamical systems and in particular facilitates the design and analysis of nonlinear adaptive controllers for interactive Lagrangian systems. Specifically, based on a new class of dynamic feedback, we propose adaptive controllers that achieve both the infinite manipulability of the controlled Lagrangian systems and the robustness with respect to the communication/sensing constraints, mainly owing to the resultant dynamic-cascade framework. The proposed paradigm yields the desirable balance between network coupling requirements and controlled dynamics of human-system interaction. We also show that a special case of our main result resolves the longstanding nonlinear bilateral teleoperation problem with arbitrary unknown time-varying delay. Simulation results show the performance of the interactive robotic systems under the proposed adaptive controllers.
Passivity-Based Adaptive Control for Visually Servoed Robotic Systems
May 08, 2016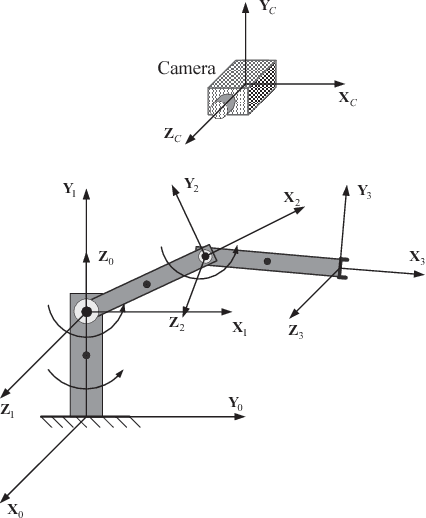
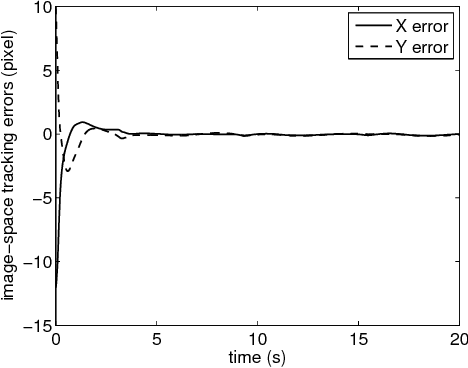
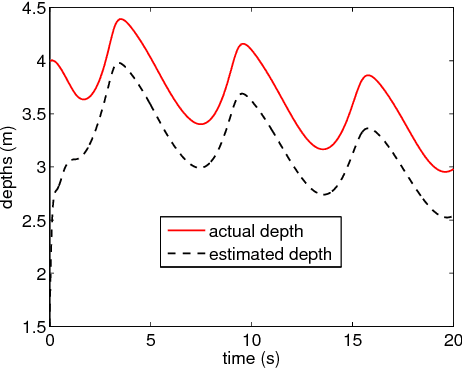
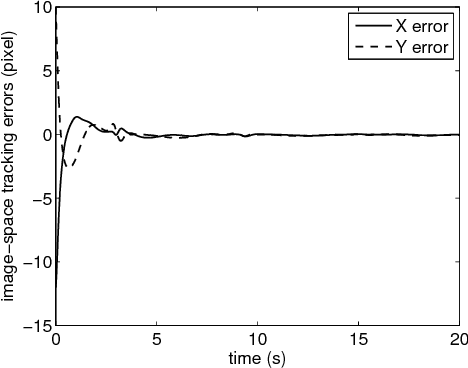
This paper investigates the visual servoing problem for robotic systems with uncertain kinematic, dynamic, and camera parameters. We first present the passivity properties associated with the overall kinematics of the system, and then propose two passivity-based adaptive control schemes to resolve the visual tracking problem. One scheme employs the adaptive inverse-Jacobian-like feedback, and the other employs the adaptive transpose Jacobian feedback. With the Lyapunov analysis approach, it is shown that under either of the proposed control schemes, the image-space tracking errors converge to zero without relying on the assumption of the invertibility of the estimated depth. Numerical simulations are performed to show the tracking performance of the proposed adaptive controllers.
Adaptive Control of Robot Manipulators With Uncertain Kinematics and Dynamics
Feb 12, 2016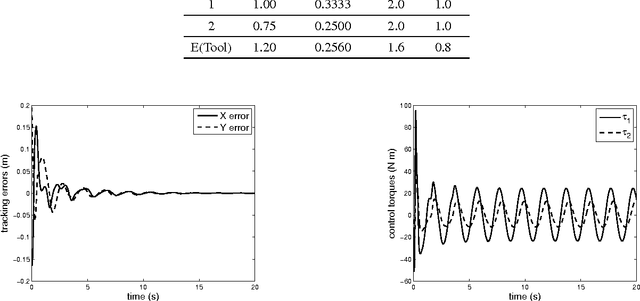
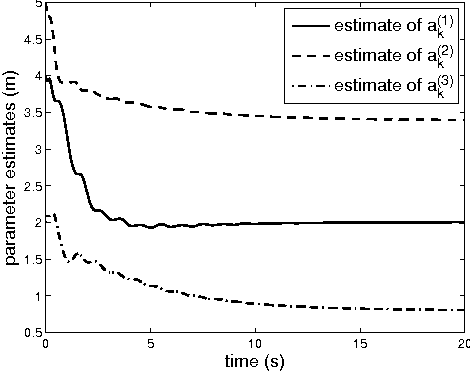
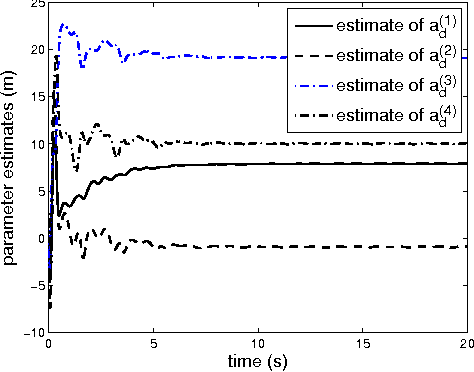
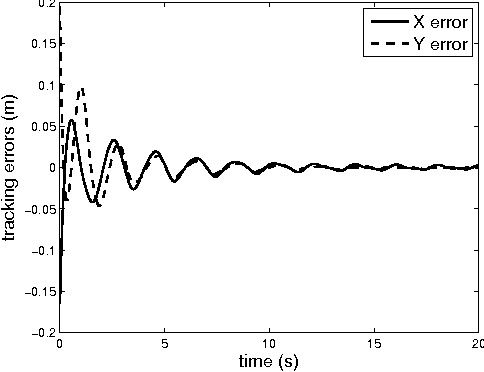
In this paper, we investigate the adaptive control problem for robot manipulators with both the uncertain kinematics and dynamics. We propose two adaptive control schemes to realize the objective of task-space trajectory tracking irrespective of the uncertain kinematics and dynamics. The proposed controllers have the desirable separation property, and we also show that the first adaptive controller with appropriate modifications can yield improved performance, without the expense of conservative gain choice. The performance of the proposed controllers is shown by numerical simulations.
* 18 pages, 7 figures, revised for improving the presentation and adding some contents and references based on the reviewers' and AE's comments from IEEE Transactions on Automatic Control
Adaptive Visual Tracking for Robotic Systems Without Image-Space Velocity Measurement
Apr 27, 2015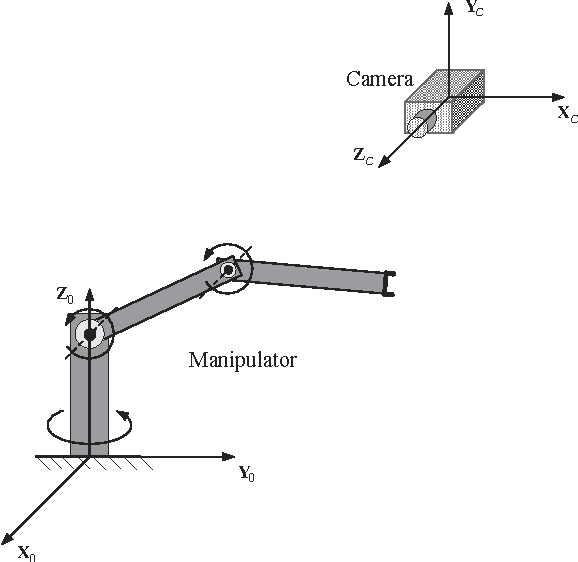
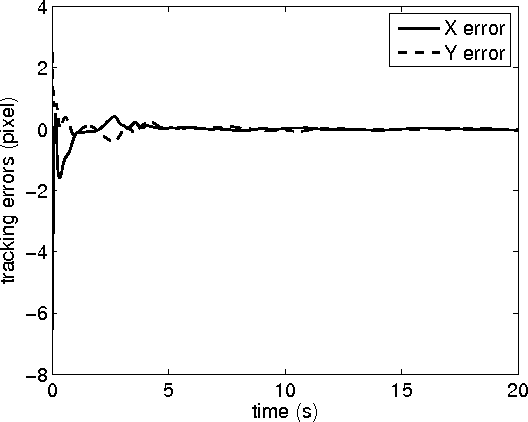
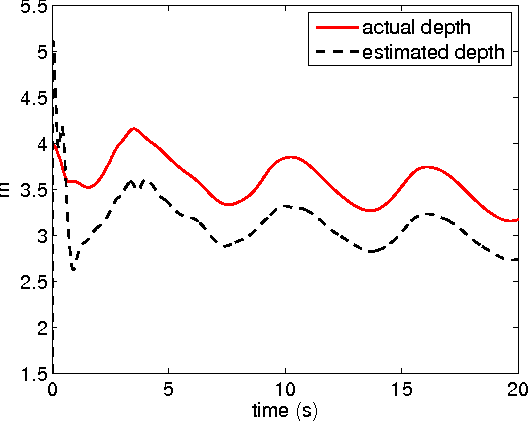
In this paper, we investigate the visual tracking problem for robotic systems without image-space velocity measurement, simultaneously taking into account the uncertainties of the camera model and the manipulator kinematics and dynamics. We propose a new image-space observer that exploits the image-space velocity information contained in the unknown kinematics, upon which, we design an adaptive controller without using the image-space velocity signal where the adaptations of the depth-rate-independent kinematic parameter and depth parameter are driven by both the image-space tracking errors and observation errors. The major superiority of the proposed observer-based adaptive controller lies in its simplicity and the separation of the handling of multiple uncertainties in visually servoed robotic systems, thus avoiding the overparametrization problem of the existing work. Using Lyapunov analysis, we demonstrate that the image-space tracking errors converge to zero asymptotically. The performance of the proposed adaptive control scheme is illustrated by a numerical simulation.
* 21 pages, 3 figures, revised for making improvements based on the reviewers' and AE's comments from Automatica and for adding the journal reference