 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIPIC: Matryoshka Representation Learning via Self-Distilled Intra-Relational and Progressive Information Chaining
Apr 27, 2026Representation learning is fundamental to NLP, but building embeddings that work well at different computational budgets is challenging. Matryoshka Representation Learning (MRL) offers a flexible inference paradigm through nested embeddings; however, learning such structures requires explicit coordination of how information is arranged across embedding dimensionality and model depth. In this work, we propose MIPIC (Matryoshka Representation Learning via Self-Distilled Intra-Relational Alignment and Progressive Information Chaining), a unified training framework designed to produce structurally coherent and semantically compact Matryoshka representations. MIPIC promotes cross-dimensional structural consistency through Self-Distilled Intra-Relational Alignment (SIA), which aligns token-level geometric and attention-driven relations between full and truncated representations using top-k CKA self-distillation. Complementarily, it enables depth-wise semantic consolidation via Progressive Information Chaining (PIC), a scaffolded alignment strategy that incrementally transfers mature task semantics from deeper layers into earlier layers. Extensive experiments on STS, NLI, and classification benchmarks (spanning models from TinyBERT to BGEM3, Qwen3) demonstrate that MIPIC yields Matryoshka representations that are highly competitive across all capacities, with significant performance advantages observed under extreme low-dimensional.
Intent expression using eye robot for mascot robot system
Apr 10, 2009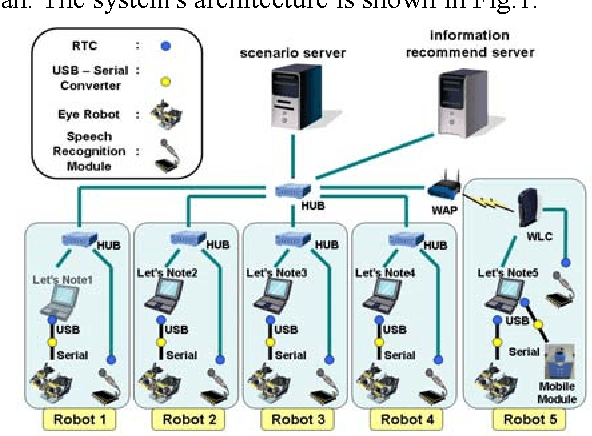
An intent expression system using eye robots is proposed for a mascot robot system from a viewpoint of humatronics. The eye robot aims at providing a basic interface method for an information terminal robot system. To achieve better understanding of the displayed information, the importance and the degree of certainty of the information should be communicated along with the main content. The proposed intent expression system aims at conveying this additional information using the eye robot system. Eye motions are represented as the states in a pleasure-arousal space model. Changes in the model state are calculated by fuzzy inference according to the importance and degree of certainty of the displayed information. These changes influence the arousal-sleep coordinates in the space that corresponds to levels of liveliness during communication. The eye robot provides a basic interface for the mascot robot system that is easy to be understood as an information terminal for home environments in a humatronics society.
* 5 pages
Fuzzy inference based mentality estimation for eye robot agent
Apr 10, 2009Household robots need to communicate with human beings in a friendly fashion. To achieve better understanding of displayed information, an importance and a certainty of the information should be communicated together with the main information. The proposed intent expression system aims to convey this additional information using an eye robot. The eye motions are represented as states in a pleasure-arousal space model. Change of the model state is calculated by fuzzy inference according to the importance and certainty of the displayed information. This change influences the arousal-sleep coordinate in the space which corresponds to activeness in communication. The eye robot provides a basic interface for the mascot robot system which is an easy to understand information terminal for home environments in a humatronics society.
* 2 pages, in Japanese