 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitive Trust in HRI: "Pay Attention to Me and I'll Trust You Even if You are Wrong"
Dec 09, 2025



Cognitive trust and the belief that a robot is capable of accurately performing tasks, are recognized as central factors in fostering high-quality human-robot interactions. It is well established that performance factors such as the robot's competence and its reliability shape cognitive trust. Recent studies suggest that affective factors, such as robotic attentiveness, also play a role in building cognitive trust. This work explores the interplay between these two factors that shape cognitive trust. Specifically, we evaluated whether different combinations of robotic competence and attentiveness introduce a compensatory mechanism, where one factor compensates for the lack of the other. In the experiment, participants performed a search task with a robotic dog in a 2x2 experimental design that included two factors: competence (high or low) and attentiveness (high or low). The results revealed that high attentiveness can compensate for low competence. Participants who collaborated with a highly attentive robot that performed poorly reported trust levels comparable to those working with a highly competent robot. When the robot did not demonstrate attentiveness, low competence resulted in a substantial decrease in cognitive trust. The findings indicate that building cognitive trust in human-robot interaction may be more complex than previously believed, involving emotional processes that are typically overlooked. We highlight an affective compensatory mechanism that adds a layer to consider alongside traditional competence-based models of cognitive trust.
A Matter of Height: The Impact of a Robotic Object on Human Compliance
Sep 19, 2025


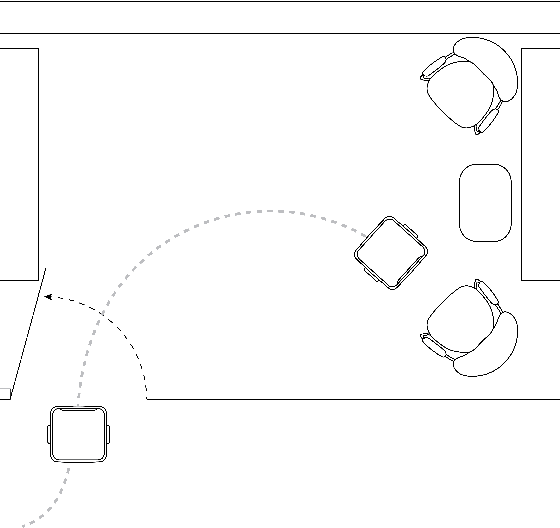
Robots come in various forms and have different characteristics that may shape the interaction with them. In human-human interactions, height is a characteristic that shapes human dynamics, with taller people typically perceived as more persuasive. In this work, we aspired to evaluate if the same impact replicates in a human-robot interaction and specifically with a highly non-humanoid robotic object. The robot was designed with modules that could be easily added or removed, allowing us to change its height without altering other design features. To test the impact of the robot's height, we evaluated participants' compliance with its request to volunteer to perform a tedious task. In the experiment, participants performed a cognitive task on a computer, which was framed as the main experiment. When done, they were informed that the experiment was completed. While waiting to receive their credits, the robotic object, designed as a mobile robotic service table, entered the room, carrying a tablet that invited participants to complete a 300-question questionnaire voluntarily. We compared participants' compliance in two conditions: A Short robot composed of two modules and 95cm in height and a Tall robot consisting of three modules and 132cm in height. Our findings revealed higher compliance with the Short robot's request, demonstrating an opposite pattern to human dynamics. We conclude that while height has a substantial social impact on human-robot interactions, it follows a unique pattern of influence. Our findings suggest that designers cannot simply adopt and implement elements from human social dynamics to robots without testing them first.
"It was Tragic": Exploring the Impact of a Robot's Shutdown
Sep 08, 2025It is well established that people perceive robots as social entities, even when they are not designed for social interaction. We evaluated whether the social interpretation of robotic gestures should also be considered when turning off a robot. In the experiment, participants engaged in a brief preliminary neutral interaction while a robotic arm showed interest in their actions. At the end of the task, participants were asked to turn off the robotic arm under two conditions: (1) a Non-designed condition, where all of the robot's engines were immediately and simultaneously turned off, as robots typically shut down; (2) a Designed condition, where the robot's engines gradually folded inward in a motion resembling "falling asleep." Our findings revealed that all participants anthropomorphized the robot's movement when it was turned off. In the Non-designed condition, most participants interpreted the robot's turn-off movement negatively, as if the robot had "died." In the Designed condition, most participants interpreted it more neutrally, stating that the robot "went to sleep." The robot's turn-off movement also impacted its perception, leading to higher likeability, perceived intelligence, and animacy in the Designed condition. We conclude that the impact of common edge interactions, such as turning off a robot, should be carefully designed while considering people's automatic tendency to perceive robots as social entities.