 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS3-CLIP: Video Super Resolution for Person-ReID
Jan 13, 2026Tracklet quality is often treated as an afterthought in most person re-identification (ReID) methods, with the majority of research presenting architectural modifications to foundational models. Such approaches neglect an important limitation, posing challenges when deploying ReID systems in real-world, difficult scenarios. In this paper, we introduce S3-CLIP, a video super-resolution-based CLIP-ReID framework developed for the VReID-XFD challenge at WACV 2026. The proposed method integrates recent advances in super-resolution networks with task-driven super-resolution pipelines, adapting them to the video-based person re-identification setting. To the best of our knowledge, this work represents the first systematic investigation of video super-resolution as a means of enhancing tracklet quality for person ReID, particularly under challenging cross-view conditions. Experimental results demonstrate performance competitive with the baseline, achieving 37.52% mAP in aerial-to-ground and 29.16% mAP in ground-to-aerial scenarios. In the ground-to-aerial setting, S3-CLIP achieves substantial gains in ranking accuracy, improving Rank-1, Rank-5, and Rank-10 performance by 11.24%, 13.48%, and 17.98%, respectively.
Design of the Anatomically Correct, Biomechatronic Hand
Sep 17, 2019
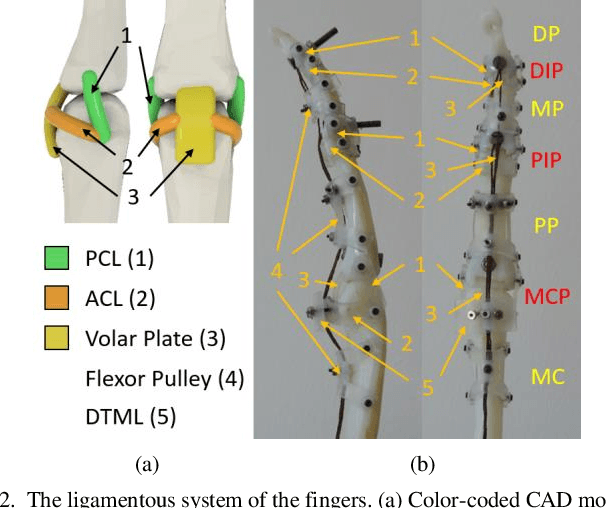
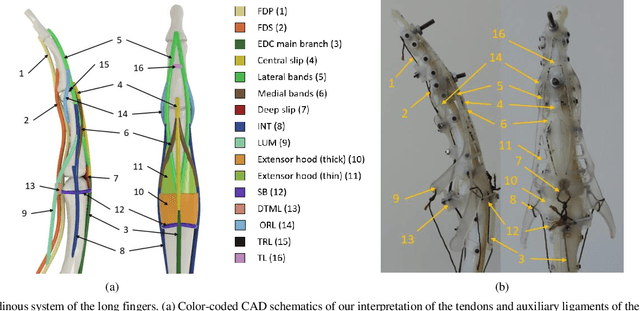
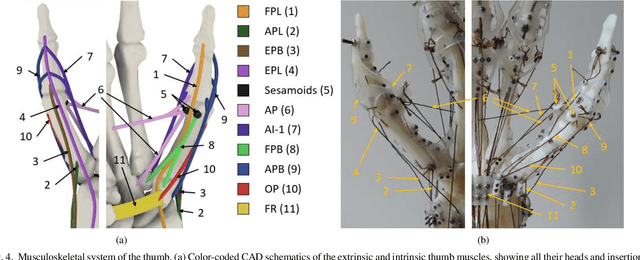
Following the recent advances in the field of robotic hand development, it can be inferred that the greatest challenge lies in restoring not just general functionality, but the delicate dexterity of the human hand. Results from studying its movement kinematics and dynamics indicate that the intricate anatomical features and structural details are essential for producing such versatility. To address this, we present the Anatomically Correct, Biomechatronic (ACB) Hand, by explaining the purpose and implementation of every functionally significant bone, ligament, finger-actuating intrinsic and extrinsic muscle, tendinous network and pulley system. We biomechanically validate our results using Landsmeers models, and demonstrate the hands performance by examining the execution of certain synergistic movements, analyzing fingertip trajectories, performing the Kapandji test, and realizing the GRASP taxonomy. This study aims to promote how anatomically accurate design considerations can assist in consequentially attaining more human-like functionality, while still allowing for robust structural elements towards advancing research in hand biomechanics, prosthetics and teleoperation.