 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContextual Information Enhanced Convolutional Neural Networks for Retinal Vessel Segmentation in Color Fundus Images
Mar 25, 2021

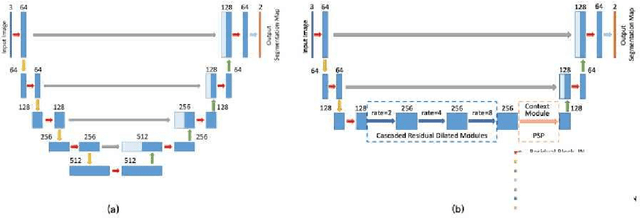
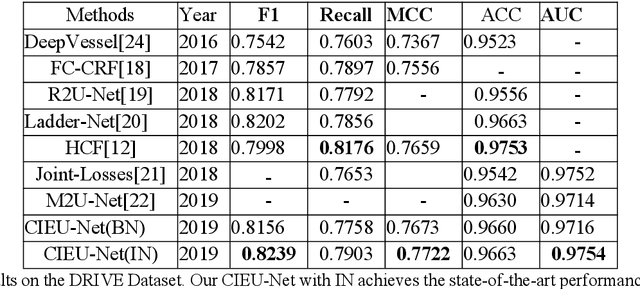
Accurate retinal vessel segmentation is a challenging problem in color fundus image analysis. An automatic retinal vessel segmentation system can effectively facilitate clinical diagnosis and ophthalmological research. Technically, this problem suffers from various degrees of vessel thickness, perception of details, and contextual feature fusion. For addressing these challenges, a deep learning based method has been proposed and several customized modules have been integrated into the well-known encoder-decoder architecture U-net, which is mainly employed in medical image segmentation. Structurally, cascaded dilated convolutional modules have been integrated into the intermediate layers, for obtaining larger receptive field and generating denser encoded feature maps. Also, the advantages of the pyramid module with spatial continuity have been taken, for multi-thickness perception, detail refinement, and contextual feature fusion. Additionally, the effectiveness of different normalization approaches has been discussed in network training for different datasets with specific properties. Experimentally, sufficient comparative experiments have been enforced on three retinal vessel segmentation datasets, DRIVE, CHASEDB1, and the unhealthy dataset STARE. As a result, the proposed method outperforms the work of predecessors and achieves state-of-the-art performance in Sensitivity/Recall, F1-score and MCC.
Accurate Cell Segmentation in Digital Pathology Images via Attention Enforced Networks
Dec 27, 2020
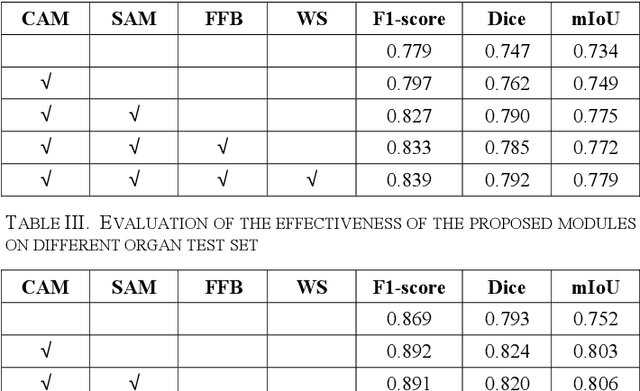
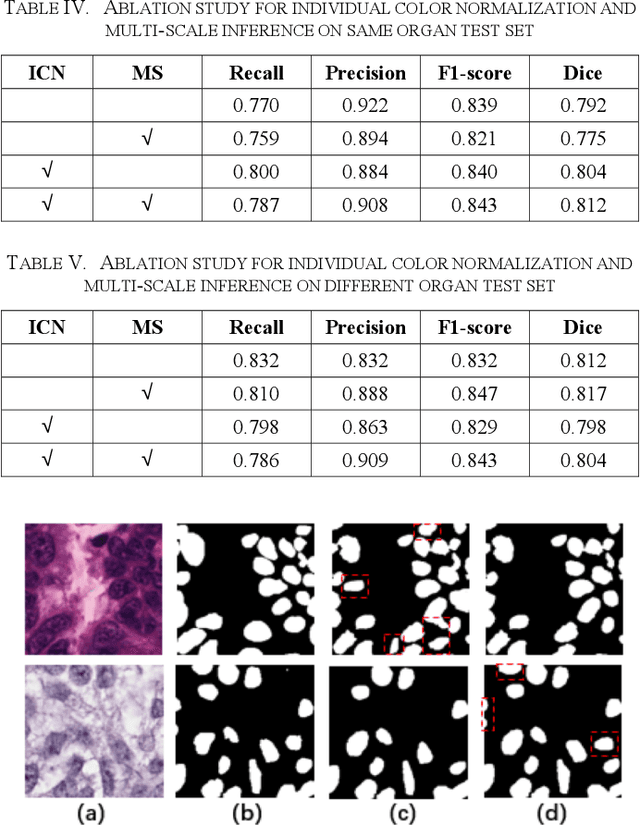
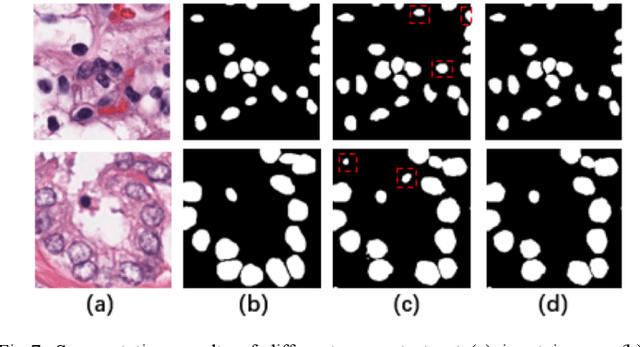
Automatic cell segmentation is an essential step in the pipeline of computer-aided diagnosis (CAD), such as the detection and grading of breast cancer. Accurate segmentation of cells can not only assist the pathologists to make a more precise diagnosis, but also save much time and labor. However, this task suffers from stain variation, cell inhomogeneous intensities, background clutters and cells from different tissues. To address these issues, we propose an Attention Enforced Network (AENet), which is built on spatial attention module and channel attention module, to integrate local features with global dependencies and weight effective channels adaptively. Besides, we introduce a feature fusion branch to bridge high-level and low-level features. Finally, the marker controlled watershed algorithm is applied to post-process the predicted segmentation maps for reducing the fragmented regions. In the test stage, we present an individual color normalization method to deal with the stain variation problem. We evaluate this model on the MoNuSeg dataset. The quantitative comparisons against several prior methods demonstrate the superiority of our approach.