 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElastomeric Strain Limitation for Design of Soft Pneumatic Actuators
Apr 03, 2026Modern robots embody power and precision control. Yet, as robots undertake tasks that apply forces on humans, this power brings risk of injury. Soft robotic actuators use deformation to produce smooth, continuous motions and conform to delicate objects while imparting forces capable of safely pushing humans. This thesis presents strategies for the design, modeling, and strain-based control of human-safe elastomeric soft pneumatic actuators (SPA) for force generation, focusing on embodied mechanical response to simple pressure inputs. We investigate electroadhesive (EA) strain limiters for variable shape generation, rapid force application, and targeted inflation trajectories. We attach EA clutches to a concentrically strain-limited elastomeric membrane to alter the inflation trajectory and rapidly reorient the inflated shape. We expand the capabilities of EA for soft robots by encasing them in elastomeric sheaths and varying their activation in real time, demonstrating applications in variable trajectory inflation under identical pressure sweeps. We then address the problem of trajectory control in the presence of external forces by modeling the pressure-trajectory relationship for a concentrically strain-limited class of silicone actuators. We validate theoretical models based on material properties and energy minimization using active learning and automated testing. We apply our ensemble of neural networks for inverse membrane design, specifying quasi-static mass lift trajectories from a simple pressure sweep. Finally, we demonstrate the power of multiple pressure-linked actuators in a proof-of-concept mannequin leg lift.
Active Learning Design: Modeling Force Output for Axisymmetric Soft Pneumatic Actuators
Apr 01, 2025Soft pneumatic actuators (SPA) made from elastomeric materials can provide large strain and large force. The behavior of locally strain-restricted hyperelastic materials under inflation has been investigated thoroughly for shape reconfiguration, but requires further investigation for trajectories involving external force. In this work we model force-pressure-height relationships for a concentrically strain-limited class of soft pneumatic actuators and demonstrate the use of this model to design SPA response for object lifting. We predict relationships under different loadings by solving energy minimization equations and verify this theory by using an automated test rig to collect rich data for n=22 Ecoflex 00-30 membranes. We collect this data using an active learning pipeline to efficiently model the design space. We show that this learned material model outperforms the theory-based model and naive curve-fitting approaches. We use our model to optimize membrane design for different lift tasks and compare this performance to other designs. These contributions represent a step towards understanding the natural response for this class of actuator and embodying intelligent lifts in a single-pressure input actuator system.
Electroadhesive Clutches for Programmable Shape Morphing of Soft Actuators
Nov 14, 2022



Soft robotic actuators are safe and adaptable devices with inherent compliance, which makes them attractive for manipulating delicate and complex objects. Researchers have integrated stiff materials into soft actuators to increase their force capacity and direct their deformation. However, these embedded materials have largely been pre-prescribed and static, which constrains the actuators to a predetermined range of motion. In this work, electroadhesive (EA) clutches integrated on a single-chamber soft pneumatic actuator (SPA) provide local programmable stiffness modulation to control the actuator deformation. We show that activating different clutch patterns inflates a silicone membrane into pyramidal, round, and plateau shapes. Curvatures from these shapes are combined during actuation to apply forces on both a 3.7 g and 820 g object along five different degrees of freedom (DoF). The actuator workspace is up to 12 mm for light objects. Clutch deactivation, which results in local elastomeric expansion, rapidly applies forces up to 3.2 N to an object resting on the surface and launches a 3.7 g object in controlled directions. The actuator also rotates a heavier, 820 g, object by 5 degrees and rapidly restores it to horizontal alignment after clutch deactivation. This actuator is fully powered by a 5 V battery, AA battery, DC-DC transformer, and 4.5 V (63 g) DC air pump. These results demonstrate a first step towards realizing a soft actuator with high DoF shape change that preserves the inherent benefits of pneumatic actuation while gaining the electrical controllability and strength of EA clutches. We envision such a system supplying human contact forces in the form of a low-profile sit-to-stand assistance device, bed-ridden patient manipulator, or other ergonomic mechanism. This technology was also demonstrated at ICRA 2022: https://www.youtube.com/watch?v=6Y6-iHWNi6s
Multimodal Proximity and Visuotactile Sensing With a Selectively Transmissive Soft Membrane
Apr 18, 2022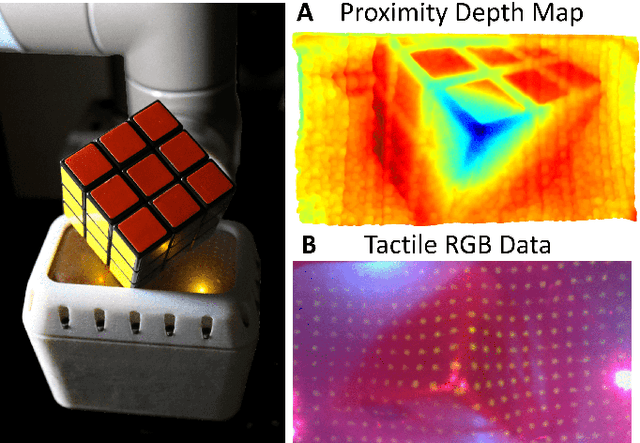
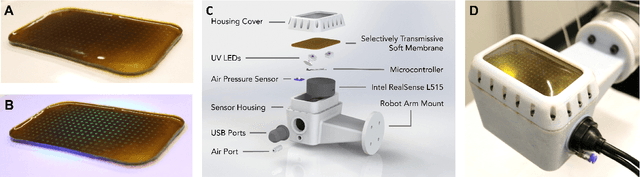
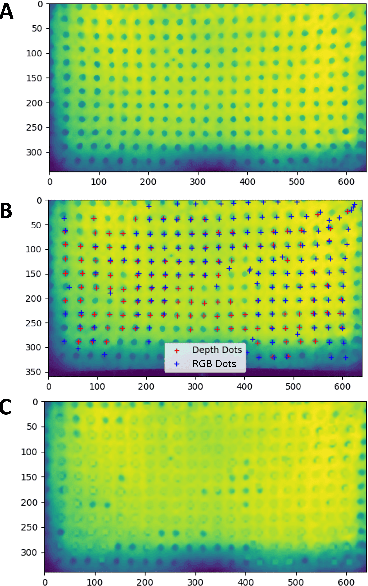
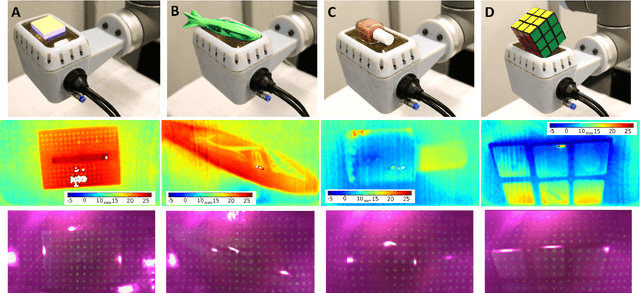
The most common sensing modalities found in a robot perception system are vision and touch, which together can provide global and highly localized data for manipulation. However, these sensing modalities often fail to adequately capture the behavior of target objects during the critical moments as they transition out of static, controlled contact with an end-effector to dynamic and uncontrolled motion. In this work, we present a novel multimodal visuotactile sensor that provides simultaneous visuotactile and proximity depth data. The sensor integrates an RGB camera and air pressure sensor to sense touch with an infrared time-of-flight (ToF) camera to sense proximity by leveraging a selectively transmissive soft membrane to enable the dual sensing modalities. We present the mechanical design, fabrication techniques, algorithm implementations, and evaluation of the sensor's tactile and proximity modalities. The sensor is demonstrated in three open-loop robotic tasks: approaching and contacting an object, catching, and throwing. The fusion of tactile and proximity data could be used to capture key information about a target object's transition behavior for sensor-based control in dynamic manipulation.