 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoSIM: An open source SIL framework for Ackermann Vehicular Systems with Monocular Vision
Mar 25, 2026This paper presents an open-source Software-in-the-Loop (SIL) simulation platform designed for autonomous Ackerman vehicle research and education. The proposed framework focuses on simplicity, while making it easy to work with small-scale experimental setups, such as the XTENTH-CAR platform. The system was designed using open source tools, creating an environment with a monocular camera vision system to capture stimuli from it with minimal computational overhead through a sliding window based lane detection method. The platform supports a flexible algorithm testing and validation environment, allowing researchers to implement and compare various control strategies within an easy-to-use virtual environment. To validate the working of the platform, Model Predictive Control (MPC) and Proportional-Integral-Derivative (PID) algorithms were implemented within the SIL framework. The results confirm that the platform provides a reliable environment for algorithm verification, making it an ideal tool for future multi-agent system research, educational purposes, and low-cost AGV development. Our code is available at https://github.com/shantanu404/monosim.git.
Real-time Lane detection and Motion Planning in Raspberry Pi and Arduino for an Autonomous Vehicle Prototype
Sep 20, 2020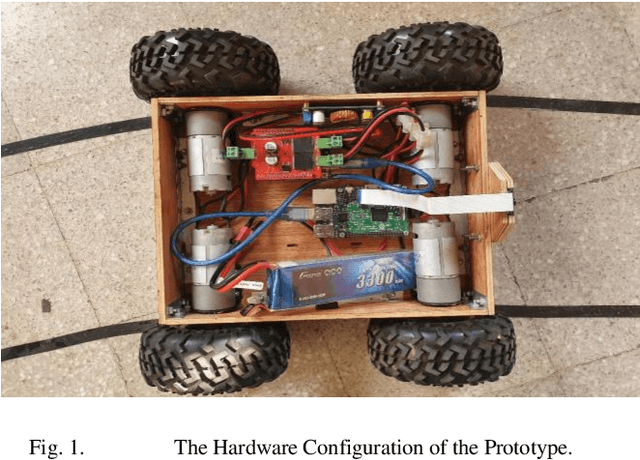
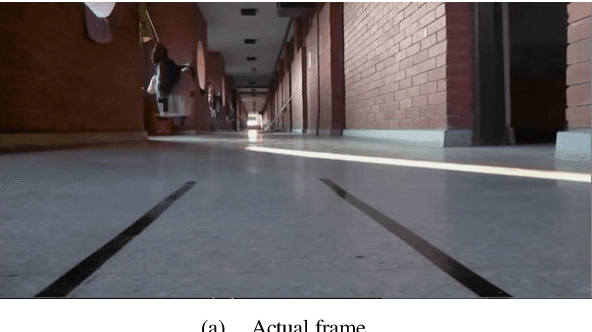
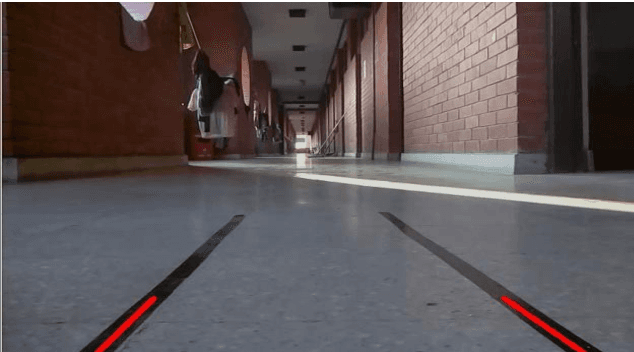

This paper discusses a vehicle prototype that recognizes streets' lanes and plans its motion accordingly without any human input. Pi Camera 1.3 captures real-time video, which is then processed by Raspberry-Pi 3.0 Model B. The image processing algorithms are written in Python 3.7.4 with OpenCV 4.2. Arduino Uno is utilized to control the PID algorithm that controls the motor controller, which in turn controls the wheels. Algorithms that are used to detect the lanes are the Canny edge detection algorithm and Hough transformation. Elementary algebra is used to draw the detected lanes. After detection, the lanes are tracked using the Kalman filter prediction method. Then the midpoint of the two lanes is found, which is the initial steering direction. This initial steering direction is further smoothed by using the Past Accumulation Average Method and Kalman Filter Prediction Method. The prototype was tested in a controlled environment in real-time. Results from comprehensive testing suggest that this prototype can detect road lanes and plan its motion successfully.