 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePheroCom: Decentralised and asynchronous swarm robotics coordination based on virtual pheromone and vibroacoustic communication
Feb 27, 2022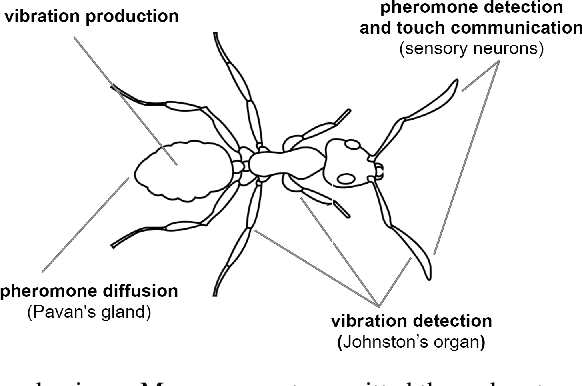
Representation and control of the dynamics of stigmergic substances used by bio-inspired approaches is a challenge when applied to robotics. In order to overcome this challenge, this work proposes a model to coordinate swarms of robots based on the virtualisation and control of these substances in a local scope. The model presents a new pheromone modelling, which enables the decentralisation and asynchronicity of navigation decisions. Each robot maintains an independent virtual pheromone map, which is continuously updated with the robot's deposits and pheromone evaporation. Moreover, the individual pheromone map is also updated by aggregating information from other robots that are exploring nearby areas. Thus, individual and independent maps replace the need of a centralising agent that controls and distributes the pheromone information, which is not always practicable. Pheromone information propagation is inspired by ants' vibroacoustic communication, which, in turn, is characterised as an indirect communication through a type of gossip protocol. The proposed model was evaluated through an agent simulation software, implemented by the authors, and in the Webots platform. Experiments were carried out to validate the model in different environments, with different shapes and sizes, as well as varying the number of robots. The analysis of the results has shown that the model was able to perform the coordination of the swarm, and the robots have exhibited an expressive performance executing the surveillance task.
A reversible system based on hybrid toggle radius-4 cellular automata and its application as a block cipher
Jun 09, 2021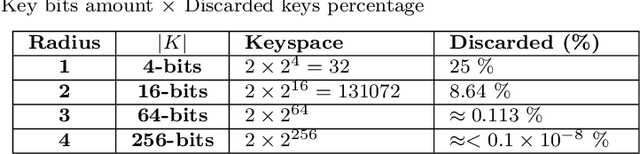
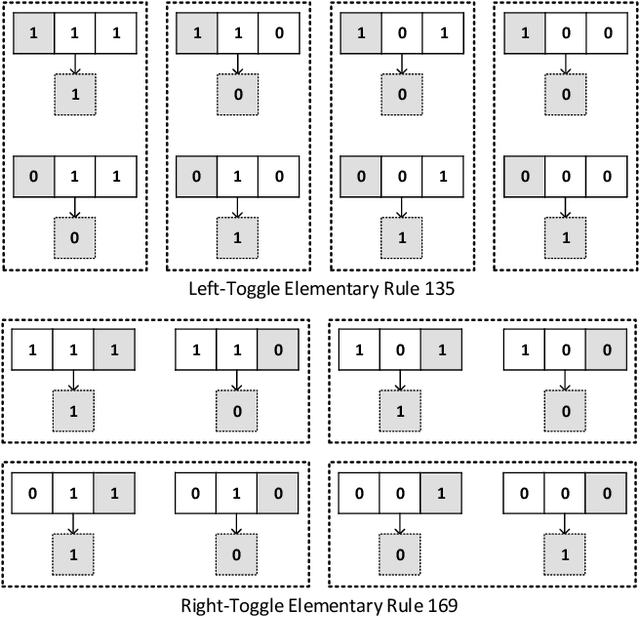
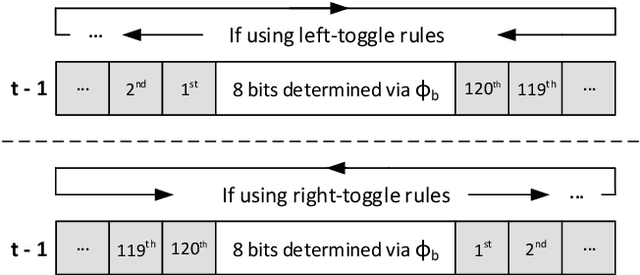
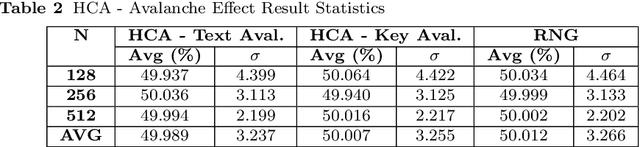
The dynamical system described herein uses a hybrid cellular automata (CA) mechanism to attain reversibility, and this approach is adapted to create a novel block cipher algorithm called HCA. CA are widely used for modeling complex systems and employ an inherently parallel model. Therefore, applications derived from CA have a tendency to fit very well in the current computational paradigm where scalability and multi-threading potential are quite desirable characteristics. HCA model has recently received a patent by the Brazilian agency INPI. Several evaluations and analyses performed on the model are presented here, such as theoretical discussions related to its reversibility and an analysis based on graph theory, which reduces HCA security to the well-known Hamiltonian cycle problem that belongs to the NP-complete class. Finally, the cryptographic robustness of HCA is empirically evaluated through several tests, including avalanche property compliance and the NIST randomness suite.