 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review of Soft Robots
Oct 08, 2019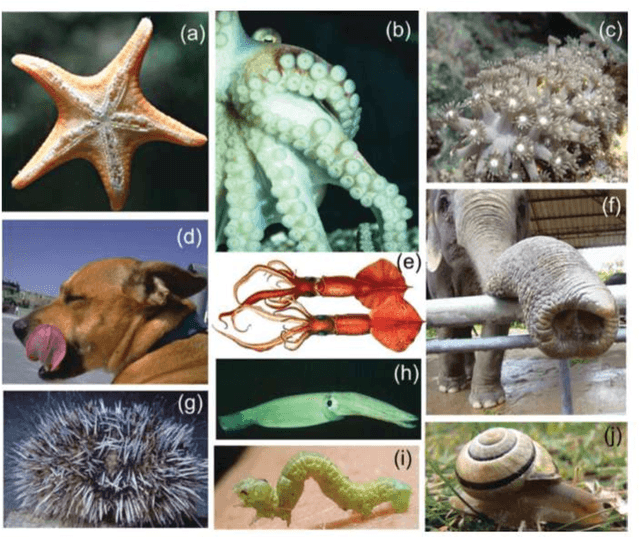
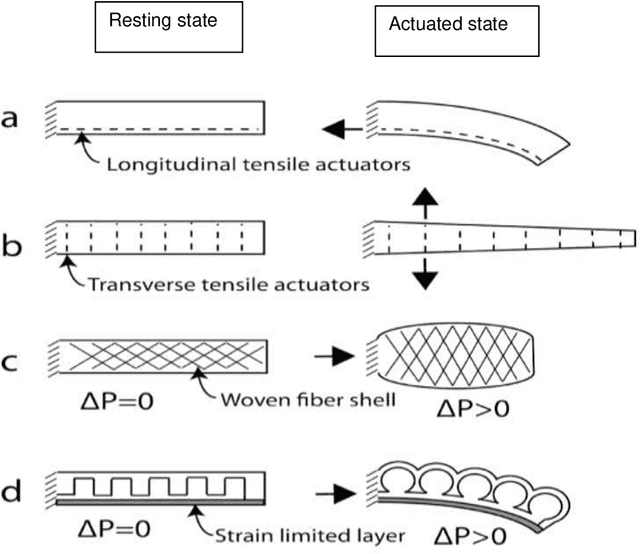
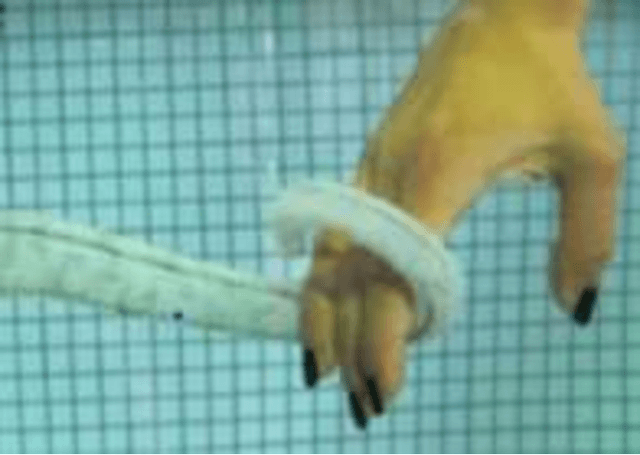
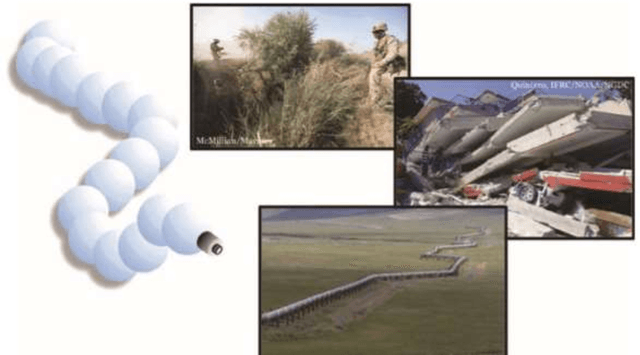
Traditional robots have rigid links and structures that limit their ability to interact with the dynamics of their immediate environment. For example, conventional robot manipulators with rigid links can only manipulate objects using specific end effectors. These robots often encounter difficulties operating in unstructured and highly congested environments. A variety of biological organisms exhibit complex movement with soft structures devoid of rigid components. Inspired by biology, researchers have been able to design and build soft robots. With a soft structure and redundant degrees of freedom, these robots can be used for delicate tasks in unstructured environments. This review discusses the motivation for soft robots, their design processes as well as their applications and limitations. Soft robots have the ability to operate in unstructured environment due to their inherent potential to exploit morphological computation to adapt to, and interact with, the world in a way that is difficult with rigid systems. Soft robots could be used for operations, ranging from search and rescue operations in a natural disaster relief effort, and of emerging interest is in the field of medical care as seen in personal robots.
Research on the Concept of Liquid State Machine
Oct 08, 2019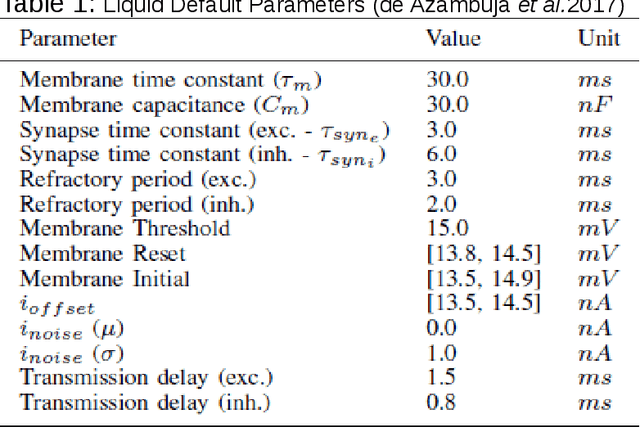
Liquid State Machine (LSM) is a neural model with real time computations which transforms the time varying inputs stream to a higher dimensional space. The concept of LSM is a novel field of research in biological inspired computation with most research effort on training the model as well as finding the optimum learning method. In this review, the performance of LSM model was investigated using two learning method, online learning and offline (batch) learning methods. The review revealed that optimal performance of LSM was recorded through online method as computational space and other complexities associated with batch learning is eliminated.
Development of a Robotic System for Automatic Wheel Removal and Fitting
Aug 19, 2019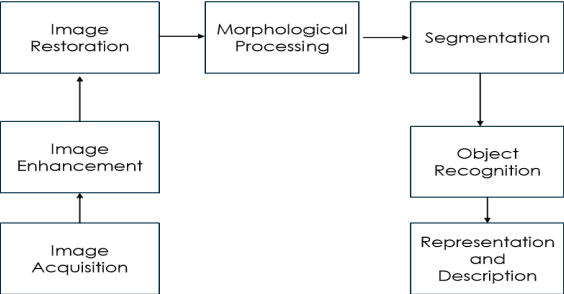
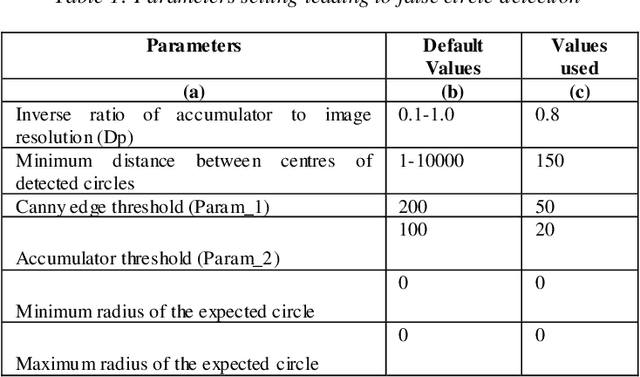
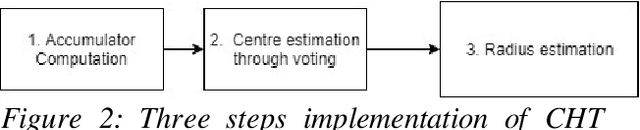
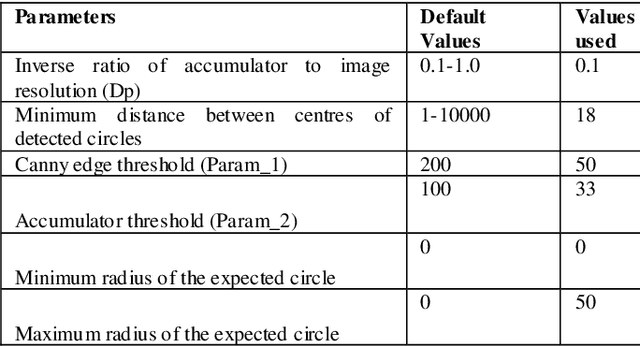
This paper discusses the image processing and computer vision algorithms for real time detection and tracking of a sample wheel of a vehicle. During the manual tyre changing process, spinal and other muscular injuries are common and even more serious injuries have been recorded when occasionally, tyres fail (burst) during this process. It, therefore, follows that the introduction of a robotic system to take over this process would be a welcome development. This work discusses various useful applicable algorithms, Circular Hough Transform (CHT) as well as Continuously adaptive mean shift (Camshift) and provides some of the software solutions which can be deployed with a robotic mechanical arm to make the task of tyre changing faster, safer and more efficient. Image acquisition and software to accurately detect and classify specific objects of interest were implemented successfully, outcomes were discussed and areas for further studies suggested.