 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLunar-G2R: Geometry-to-Reflectance Learning for High-Fidelity Lunar BRDF Estimation
Jan 15, 2026We address the problem of estimating realistic, spatially varying reflectance for complex planetary surfaces such as the lunar regolith, which is critical for high-fidelity rendering and vision-based navigation. Existing lunar rendering pipelines rely on simplified or spatially uniform BRDF models whose parameters are difficult to estimate and fail to capture local reflectance variations, limiting photometric realism. We propose Lunar-G2R, a geometry-to-reflectance learning framework that predicts spatially varying BRDF parameters directly from a lunar digital elevation model (DEM), without requiring multi-view imagery, controlled illumination, or dedicated reflectance-capture hardware at inference time. The method leverages a U-Net trained with differentiable rendering to minimize photometric discrepancies between real orbital images and physically based renderings under known viewing and illumination geometry. Experiments on a geographically held-out region of the Tycho crater show that our approach reduces photometric error by 38 % compared to a state-of-the-art baseline, while achieving higher PSNR and SSIM and improved perceptual similarity, capturing fine-scale reflectance variations absent from spatially uniform models. To our knowledge, this is the first method to infer a spatially varying reflectance model directly from terrain geometry.
SkelNetOn 2019 Dataset and Challenge on Deep Learning for Geometric Shape Understanding
Mar 21, 2019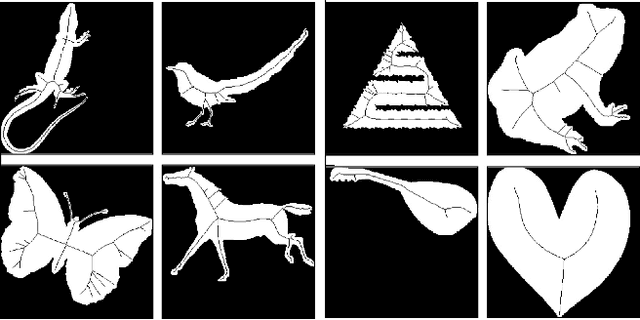
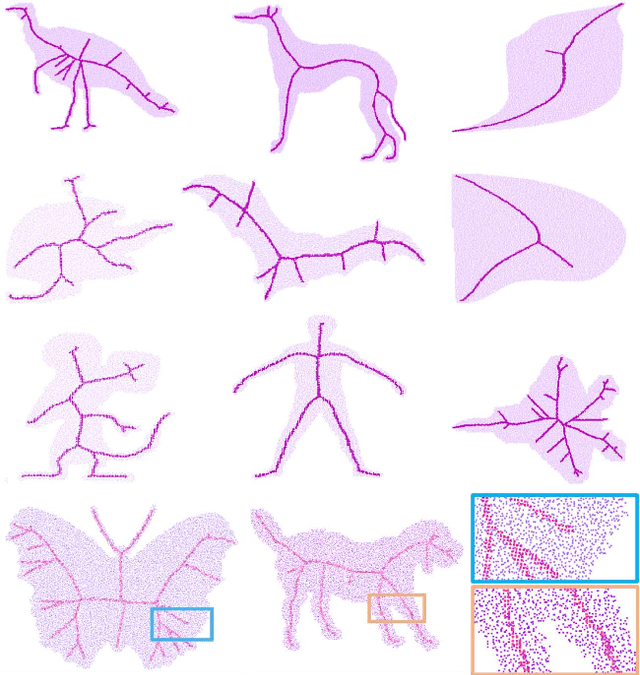
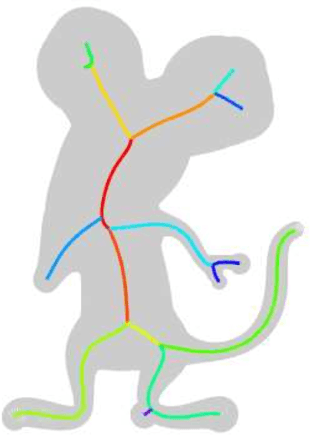
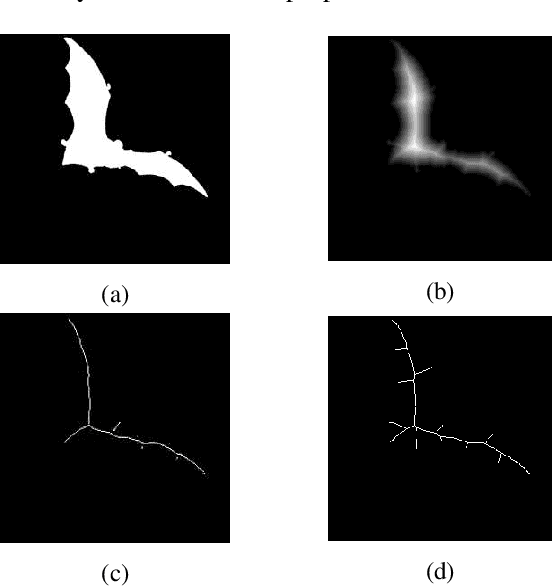
We present SkelNetOn 2019 Challenge and Deep Learning for Geometric Shape Understanding workshop to utilize existing and develop novel deep learning architectures for shape understanding. We observed that unlike traditional segmentation and detection tasks, geometry understanding is still a new area for investigation using deep learning techniques. SkelNetOn aims to bring together researchers from different domains to foster learning methods on global shape understanding tasks. We aim to improve and evaluate the state-of-the-art shape understanding approaches, and to serve as reference benchmarks for future research. Similar to other challenges in computer vision domain, SkelNetOn tracks propose three datasets and corresponding evaluation methodologies; all coherently bundled in three competitions with a dedicated workshop co-located with CVPR 2019 conference. In this paper, we describe and analyze characteristics of each dataset, define the evaluation criteria of the public competitions, and provide baselines for each task.