 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdgeNet: Balancing Accuracy and Performance for Edge-based Convolutional Neural Network Object Detectors
Nov 14, 2019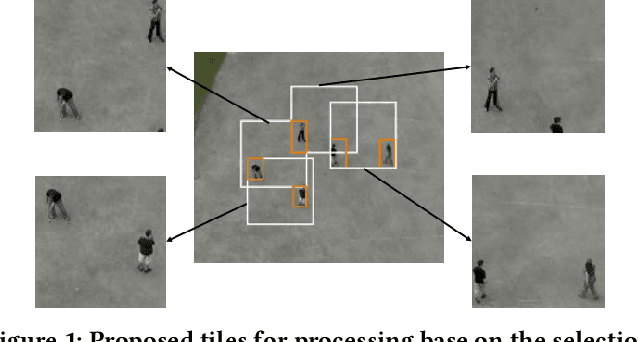
Visual intelligence at the edge is becoming a growing necessity for low latency applications and situations where real-time decision is vital. Object detection, the first step in visual data analytics, has enjoyed significant improvements in terms of state-of-the-art accuracy due to the emergence of Convolutional Neural Networks (CNNs) and Deep Learning. However, such complex paradigms intrude increasing computational demands and hence prevent their deployment on resource-constrained devices. In this work, we propose a hierarchical framework that enables to detect objects in high-resolution video frames, and maintain the accuracy of state-of-the-art CNN-based object detectors while outperforming existing works in terms of processing speed when targeting a low-power embedded processor using an intelligent data reduction mechanism. Moreover, a use-case for pedestrian detection from Unmanned-Areal-Vehicle (UAV) is presented showing the impact that the proposed approach has on sensitivity, average processing time and power consumption when is implemented on different platforms. Using the proposed selection process our framework manages to reduce the processed data by 100x leading to under 4W power consumption on different edge devices.
* George Plastiras, Christos Kyrkou, and Theocharis Theocharides. 2019. EdgeNet: Balancing Accuracy and Performance for Edge-based Convolutional Neural Network Object Detectors. In Proceedings of the 13th International Conference on Distributed Smart Cameras (ICDSC 2019). ACM, New York, NY, USA, Article 8, 6 pages
Efficient ConvNet-based Object Detection for Unmanned Aerial Vehicles by Selective Tile Processing
Nov 14, 2019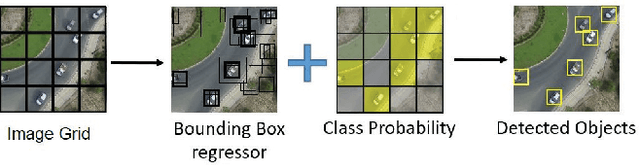
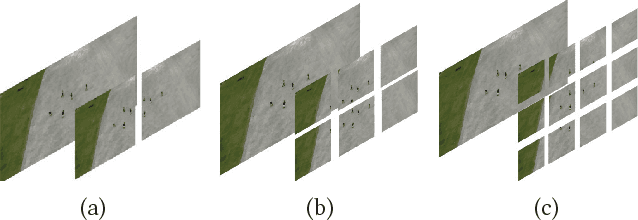
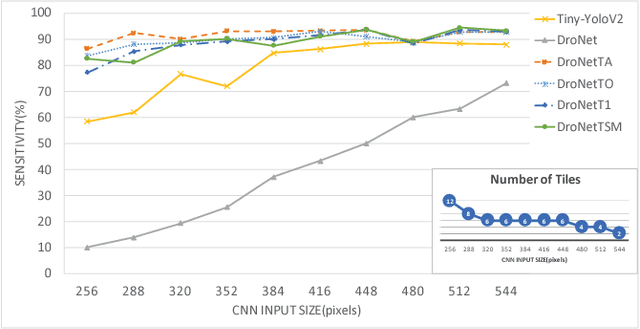
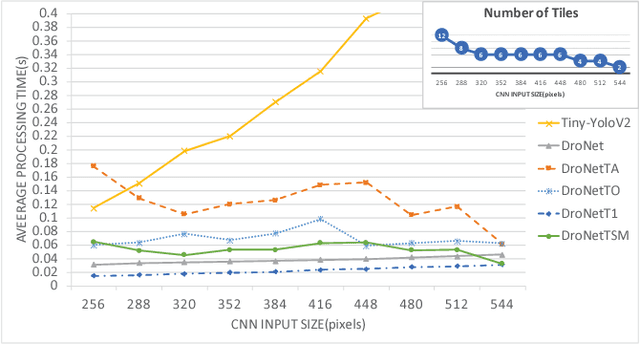
Many applications utilizing Unmanned Aerial Vehicles (UAVs) require the use of computer vision algorithms to analyze the information captured from their on-board camera. Recent advances in deep learning have made it possible to use single-shot Convolutional Neural Network (CNN) detection algorithms that process the input image to detect various objects of interest. To keep the computational demands low these neural networks typically operate on small image sizes which, however, makes it difficult to detect small objects. This is further emphasized when considering UAVs equipped with cameras where due to the viewing range, objects tend to appear relatively small. This paper therefore, explores the trade-offs involved when maintaining the resolution of the objects of interest by extracting smaller patches (tiles) from the larger input image and processing them using a neural network. Specifically, we introduce an attention mechanism to focus on detecting objects only in some of the tiles and a memory mechanism to keep track of information for tiles that are not processed. Through the analysis of different methods and experiments we show that by carefully selecting which tiles to process we can considerably improve the detection accuracy while maintaining comparable performance to CNNs that resize and process a single image which makes the proposed approach suitable for UAV applications.
* George Plastiras, Christos Kyrkou, and Theocharis Theocharides. 2018. Efficient ConvNet-based Object Detection for Unmanned Aerial Vehicles by Selective Tile Processing. In Proceedings of the 12th International Conference on Distributed Smart Cameras (ICDSC '18). ACM, New York, NY, USA, Article 3, 6 pages
DroNet: Efficient convolutional neural network detector for real-time UAV applications
Jul 18, 2018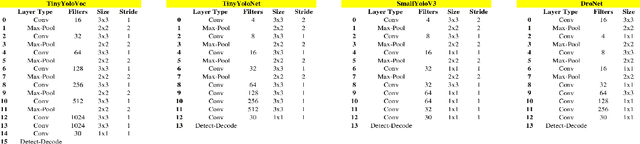
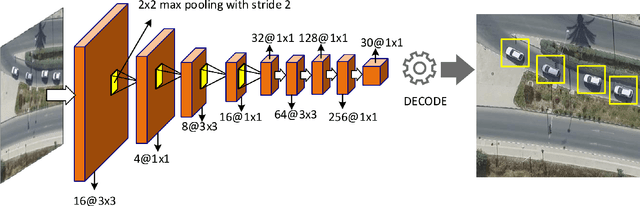
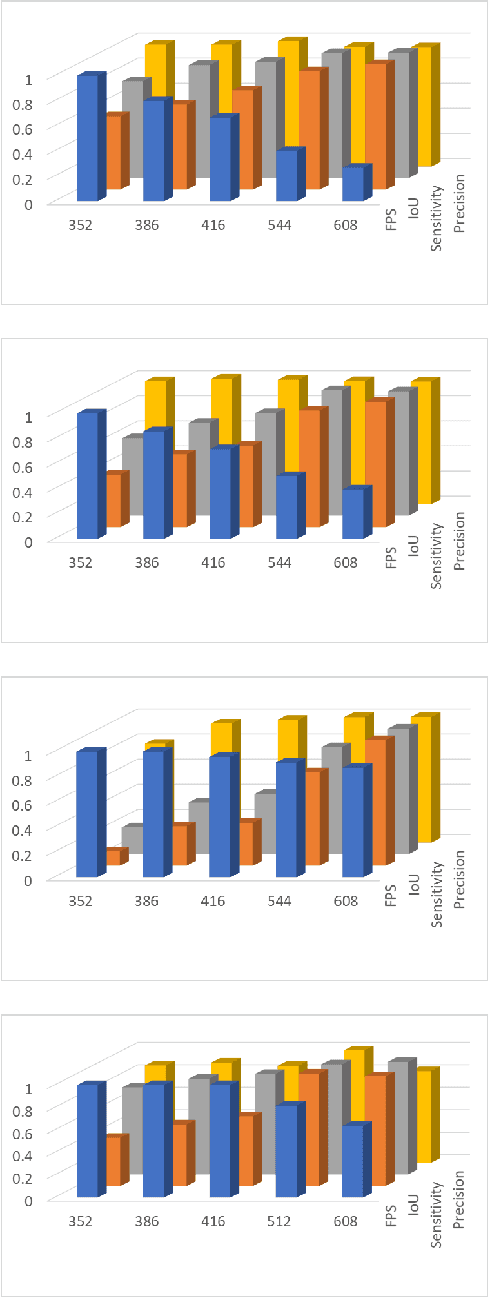
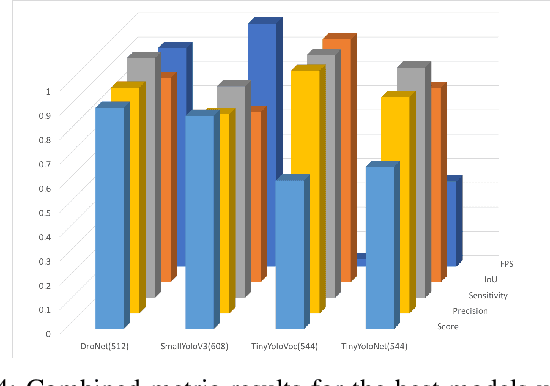
Unmanned Aerial Vehicles (drones) are emerging as a promising technology for both environmental and infrastructure monitoring, with broad use in a plethora of applications. Many such applications require the use of computer vision algorithms in order to analyse the information captured from an on-board camera. Such applications include detecting vehicles for emergency response and traffic monitoring. This paper therefore, explores the trade-offs involved in the development of a single-shot object detector based on deep convolutional neural networks (CNNs) that can enable UAVs to perform vehicle detection under a resource constrained environment such as in a UAV. The paper presents a holistic approach for designing such systems; the data collection and training stages, the CNN architecture, and the optimizations necessary to efficiently map such a CNN on a lightweight embedded processing platform suitable for deployment on UAVs. Through the analysis we propose a CNN architecture that is capable of detecting vehicles from aerial UAV images and can operate between 5-18 frames-per-second for a variety of platforms with an overall accuracy of ~95%. Overall, the proposed architecture is suitable for UAV applications, utilizing low-power embedded processors that can be deployed on commercial UAVs.
* C. Kyrkou, G. Plastiras, T. Theocharides, S. I. Venieris and C. S. Bouganis, "DroNet: Efficient convolutional neural network detector for real-time UAV applications," 2018 Design, Automation & Test in Europe Conference & Exhibition (DATE), Dresden, 2018, pp. 967-972. Keywords: Convolutional neural networks, Machine learning, autonomous aerial vehicles, computer vision, embedded systems