 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Soil Gait Planning and Control for Biped Robot using Deep Deterministic Policy Gradient Approach
Jun 13, 2023



Biped robots have plenty of benefits over wheeled, quadruped, or hexapod robots due to their ability to behave like human beings in tough and non-flat environments. Deformable terrain is another challenge for biped robots as it has to deal with sinkage and maintain stability without falling. In this study, we are proposing a Deep Deterministic Policy Gradient (DDPG) approach for motion control of a flat-foot biped robot walking on deformable terrain. We have considered a 7-link biped robot for our proposed approach. For soft soil terrain modeling, we have considered triangular Mesh to describe its geometry, where mesh parameters determine the softness of soil. All simulations have been performed on PyChrono, which can handle soft soil environments.
Planning Brachistochrone Hip Trajectory for a Toe-Foot Bipedal Robot going Downstairs
Dec 02, 2020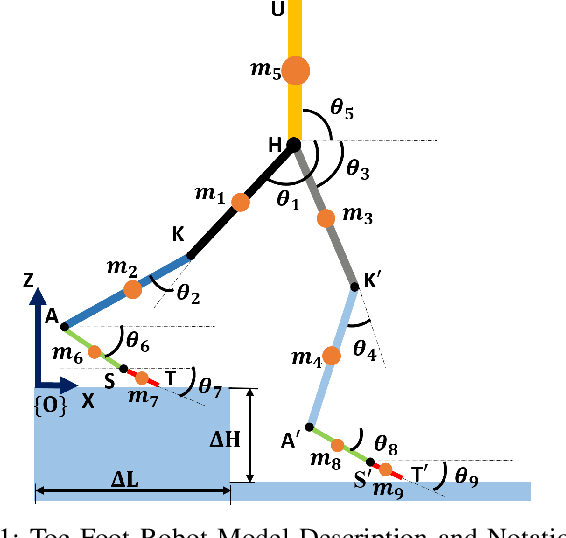
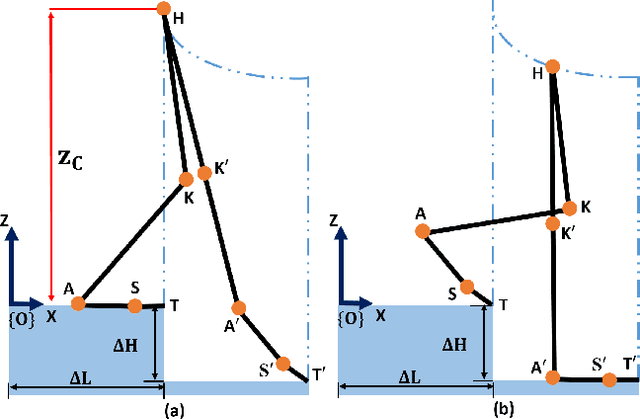
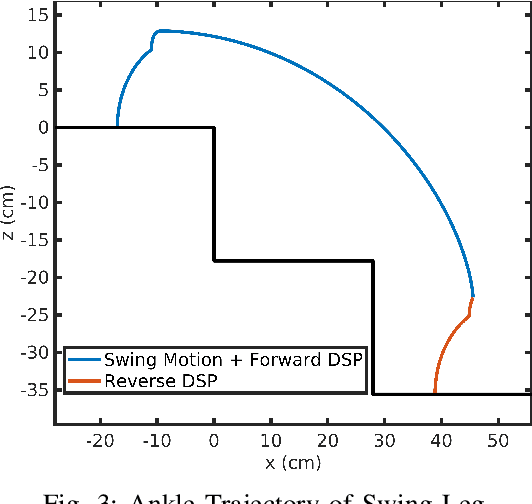
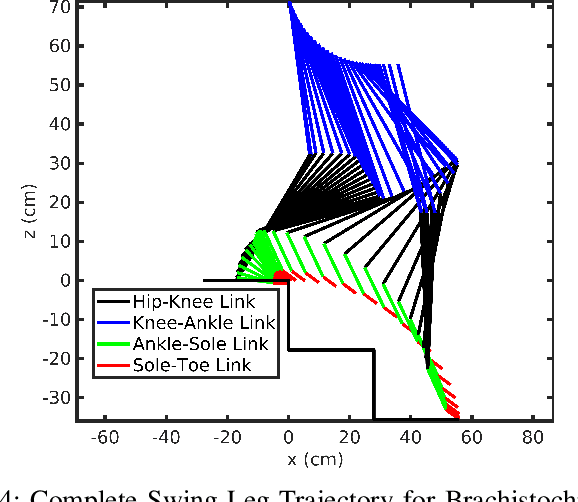
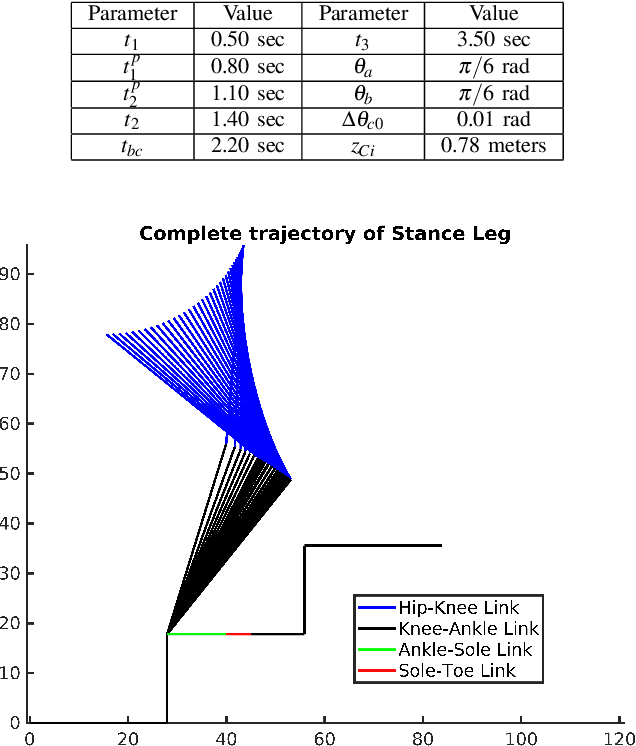
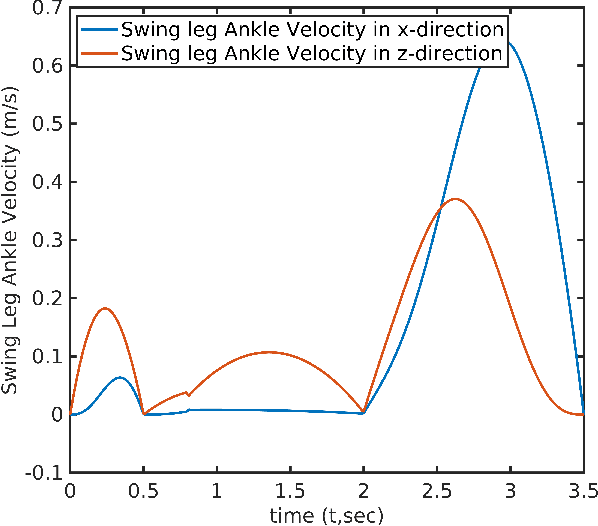
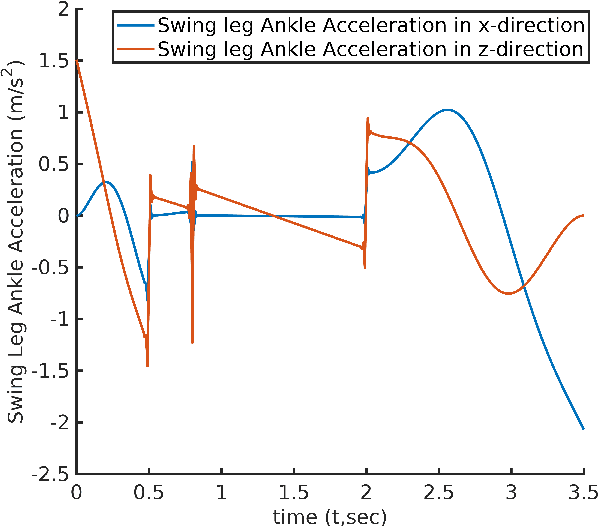
A novel efficient downstairs trajectory is proposed for a 9 link biped robot model with toe-foot. Brachistochrone is the fastest descent trajectory for a particle moving only under the influence of gravity. In most situations, while climbing downstairs, human hip also follow brachistochrone trajectory for a more responsive motion. Here, an adaptive trajectory planning algorithm is developed so that biped robots of varying link lengths, masses can climb down on varying staircase dimensions. We assume that the center of gravity (COG) of the biped concerned lies on the hip. Zero Moment Point (ZMP) based COG trajectory is considered and its stability is ensured. Cycloidal trajectory is considered for ankle of the swing leg. Parameters of both cycloid and brachistochrone depends on dimensions of staircase steps. Hence this paper can be broadly divided into 4 steps 1) Developing ZMP based brachistochrone trajectory for hip 2) Cycloidal trajectory planning for ankle by taking proper collision constraints 3) Solving Inverse kinematics using unsupervised artificial neural network (ANN) 4) Comparison between the proposed, a circular arc and a virtual slope based hip trajectory. The proposed algorithms have been implemented using MATLAB.
Cycloidal Trajectory Realization on Staircase with Optimal Trajectory Tracking Control based on Neural Network Temporal Quantized Lagrange Dynamics (NNTQLD)
Dec 02, 2020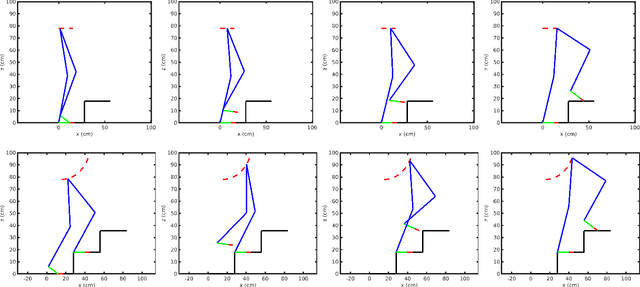
In this paper, a novel optimal technique for joint angles trajectory tracking control of a biped robot with toe foot is proposed. For the task of climbing stairs by a 9 link biped model, a cycloid trajectory for swing phase is proposed in such a way that the cycloid variables depend on the staircase dimensions. Zero Moment Point(ZMP) criteria is taken for satisfying stability constraint. This paper mainly can be divided into 4 steps: 1) Planning stable cycloid trajectory for initial step and subsequent step for climbing upstairs. 2) Inverse Kinematics using unsupervised artificial neural network with knot shifting procedure for jerk minimization. 3) Modeling Dynamics for Toe foot biped model using Lagrange Dynamics along with contact modeling using spring damper system , and finally 4) Real time joint angle trajectory tracking optimization using Temporal Quantized Lagrange Dynamics which takes inverse kinematics output from neural network as its inputs. Generated patterns have been simulated in MATLAB.