 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTRIM: Triangulating Images for Efficient Registration
May 20, 2016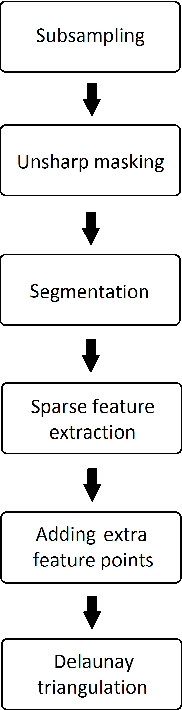
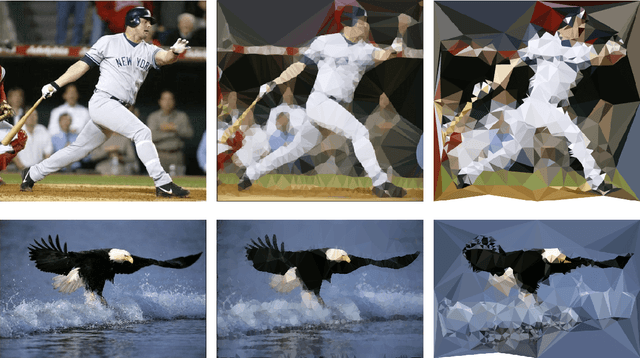
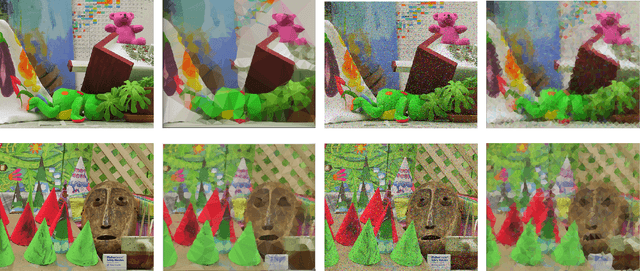
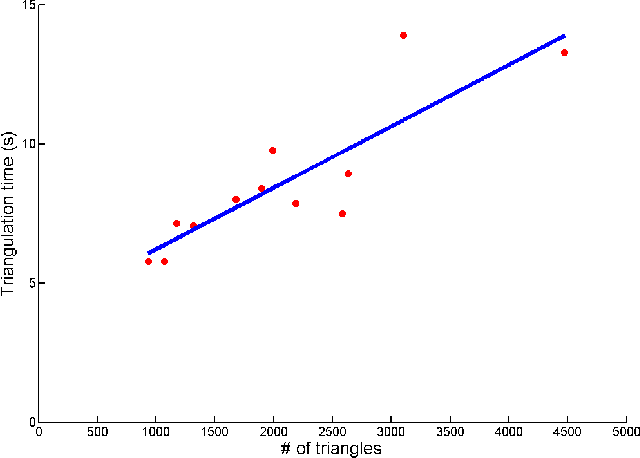
With the advancement in the digital camera technology, the use of high resolution images and videos has been widespread in the modern society. In particular, image and video frame registration is frequently applied in computer graphics and film production. However, the conventional registration approaches usually require long computational time for high quality images and video frames. This hinders the applications of the registration approaches in the modern industries. In this work, we propose a novel approach called {\em TRIM} to accelerate the computations of the registration by triangulating the images. More specifically, given a high resolution image or video frame, we compute an optimal coarse triangulation which captures the important features of the image. Then, the computation of the registration can be simplified with the aid of the coarse triangulation. Experimental results suggest that the computational time of the registration is significantly reduced using our triangulation-based approach, meanwhile the accuracy of the registration is well retained when compared with the conventional grid-based approach.
TEMPO: Feature-Endowed Teichmüller Extremal Mappings of Point Clouds
Apr 26, 2016



In recent decades, the use of 3D point clouds has been widespread in computer industry. The development of techniques in analyzing point clouds is increasingly important. In particular, mapping of point clouds has been a challenging problem. In this paper, we develop a discrete analogue of the Teichm\"{u}ller extremal mappings, which guarantee uniform conformality distortions, on point cloud surfaces. Based on the discrete analogue, we propose a novel method called TEMPO for computing Teichm\"{u}ller extremal mappings between feature-endowed point clouds. Using our proposed method, the Teichm\"{u}ller metric is introduced for evaluating the dissimilarity of point clouds. Consequently, our algorithm enables accurate recognition and classification of point clouds. Experimental results demonstrate the effectiveness of our proposed method.
Spherical Conformal Parameterization of Genus-0 Point Clouds for Meshing
Mar 16, 2016



Point cloud is the most fundamental representation of 3D geometric objects. Analyzing and processing point cloud surfaces is important in computer graphics and computer vision. However, most of the existing algorithms for surface analysis require connectivity information. Therefore, it is desirable to develop a mesh structure on point clouds. This task can be simplified with the aid of a parameterization. In particular, conformal parameterizations are advantageous in preserving the geometric information of the point cloud data. In this paper, we extend a state-of-the-art spherical conformal parameterization algorithm for genus-0 closed meshes to the case of point clouds, using an improved approximation of the Laplace-Beltrami operator on data points. Then, we propose an iterative scheme called the North-South reiteration for achieving a spherical conformal parameterization. A balancing scheme is introduced to enhance the distribution of the spherical parameterization. High quality triangulations and quadrangulations can then be built on the point clouds with the aid of the parameterizations. Also, the meshes generated are guaranteed to be genus-0 closed meshes. Moreover, using our proposed spherical conformal parameterization, multilevel representations of point clouds can be easily constructed. Experimental results demonstrate the effectiveness of our proposed framework.