 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Control of Differential Drive Robots Subject to Unmodeled Dynamics with EKF-based State Estimation
Mar 16, 2026Reliable control and state estimation of differential drive robots (DDR) operating in dynamic and uncertain environments remains a challenge, particularly when system dynamics are partially unknown and sensor measurements are prone to degradation. This work introduces a unified control and state estimation framework that combines a Lyapunov-based nonlinear controller and Adaptive Neural Networks (ANN) with Extended Kalman Filter (EKF)-based multi-sensor fusion. The proposed controller leverages the universal approximation property of neural networks to model unknown nonlinearities in real time. An online adaptation scheme updates the weights of the radial basis function (RBF), the architecture chosen for the ANN. The learned dynamics are integrated into a feedback linearization (FBL) control law, for which theoretical guarantees of closed-loop stability and asymptotic convergence in a trajectory-tracking task are established through a Lyapunov-like stability analysis. To ensure robust state estimation, the EKF fuses inertial measurement unit (IMU) and odometry from monocular, 2D-LiDAR and wheel encoders. The fused state estimate drives the intelligent controller, ensuring consistent performance even under drift, wheel slip, sensor noise and failure. Gazebo simulations and real-world experiments are done using DDR, demonstrating the effectiveness of the approach in terms of improved velocity tracking performance with reduction in linear and angular velocity errors up to $53.91\%$ and $29.0\%$ in comparison to the baseline FBL.
Intelligent control of a single-link flexible manipulator using sliding modes and artificial neural networks
Mar 21, 2022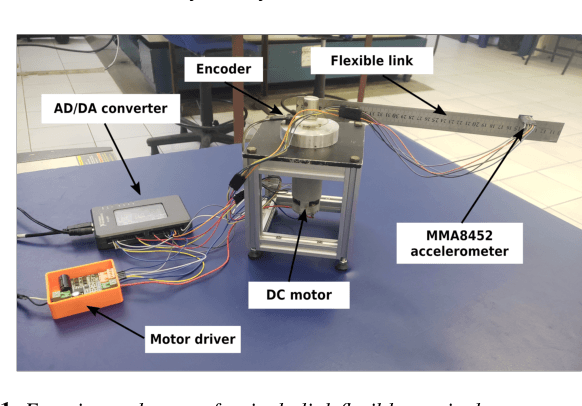
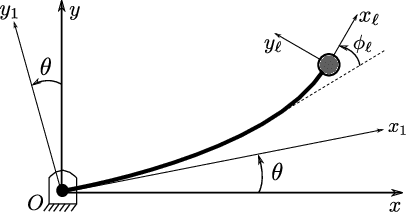
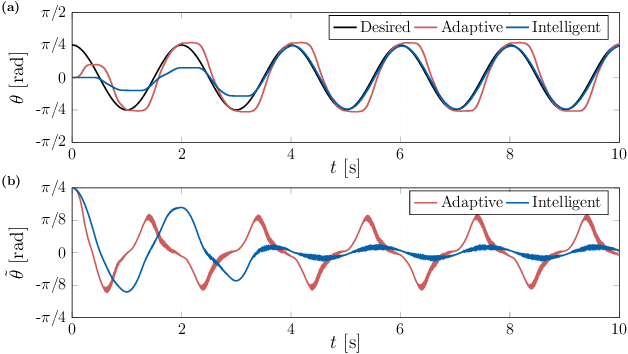
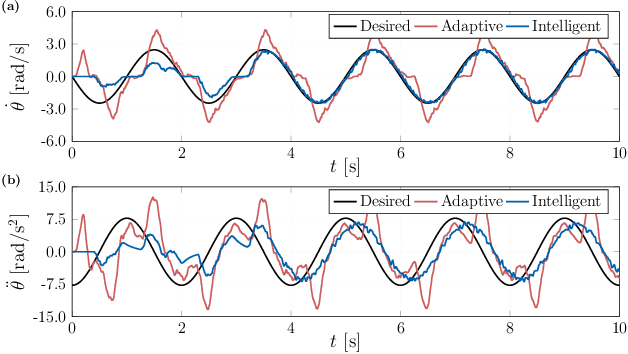
This letter presents a new intelligent control scheme for the accurate trajectory tracking of flexible link manipulators. The proposed approach is mainly based on a sliding mode controller for underactuated systems with an embedded artificial neural network to deal with modeling inaccuracies. The adopted neural network only needs a single input and one hidden layer, which drastically reduces the computational complexity of the control law and allows its implementation in low-power microcontrollers. Online learning, rather than supervised offline training, is chosen to allow the weights of the neural network to be adjusted in real time during the tracking. Therefore, the resulting controller is able to cope with the underactuating issues and to adapt itself by learning from experience, which grants the capacity to deal with plant dynamics properly. The boundedness and convergence properties of the tracking error are proved by evoking Barbalat's lemma in a Lyapunov-like stability analysis. Experimental results obtained with a small single-link flexible manipulator show the efficacy of the proposed control scheme, even in the presence of a high level of uncertainty and noisy signals.
* 4 pages, 5 figures