 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn initial study on estimating area of a leaf using image processing
Jul 02, 2018
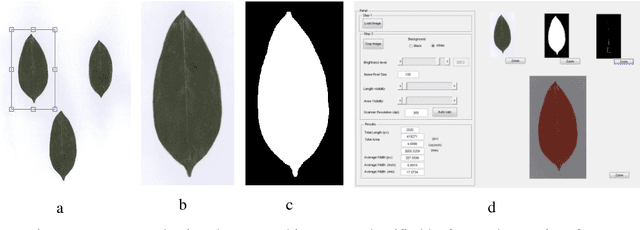
Calculating leaf area is very important. Computer aided image processing can make this faster and more accurate. This include scanning the leaf , converting it to binary image and calculation of number of pixels covered. Later this is converted to mm2.
Simulation of optical flow and fuzzy based obstacle avoidance system for mobile robots
Aug 08, 2015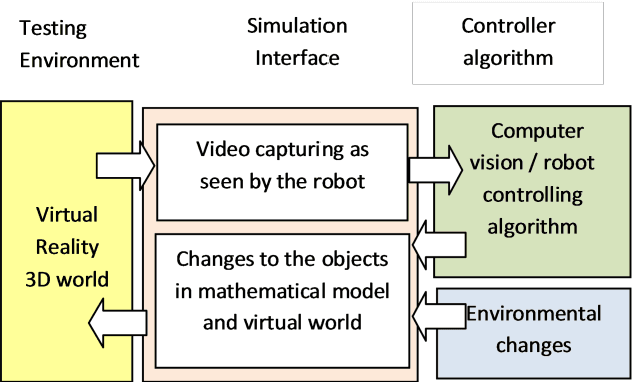
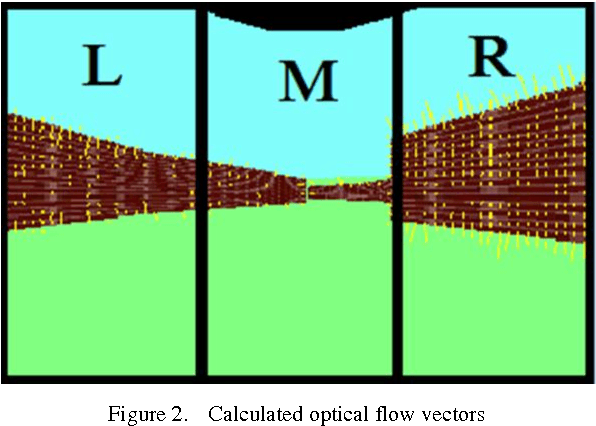
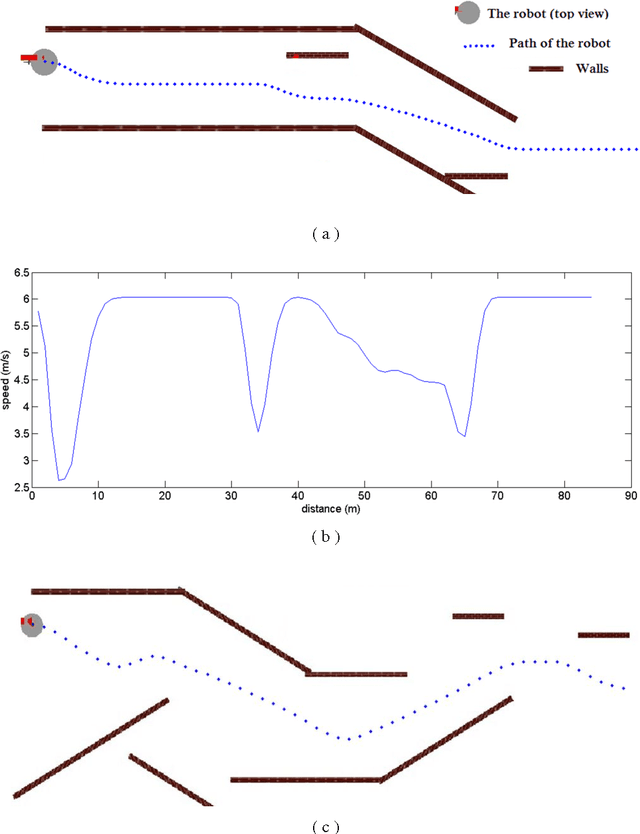
Honey bees use optical flow to avoid obstacles effectively. In this research work similar methodology was tested on a simulated mobile robot. Simulation framework was based on VRML and Simulink in a 3D world. Optical flow vectors were calculated from a video scene captured by a virtual camera which was used as inputs to a fuzzy logic controller. Fuzzy logic controller decided the locomotion of the robot. Different fuzzy logic rules were evaluated. The robot was able to navigate through complex static and dynamic environments effectively, avoiding obstacles on its path.
* 4 pages, Published in 30 April 2015