 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Colon Cancer Grading with Graph Neural Networks
Oct 02, 2020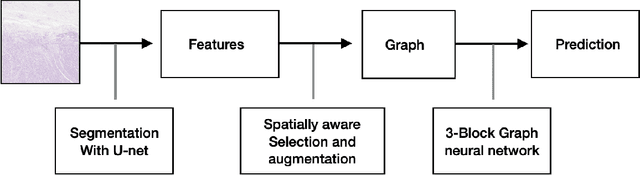
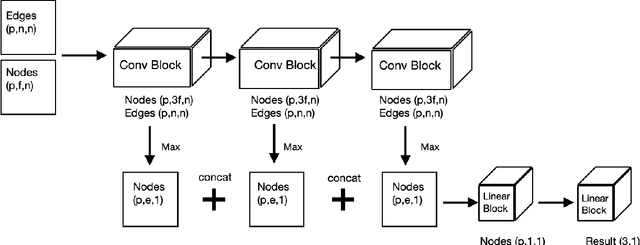
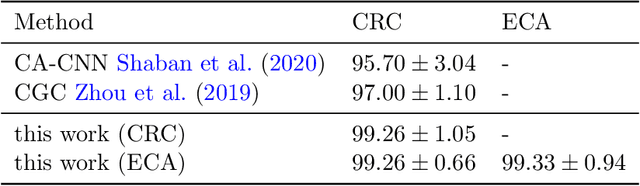
Dealing with the application of grading colorectal cancer images, this work proposes a 3 step pipeline for prediction of cancer levels from a histopathology image. The overall model performs better compared to other state of the art methods on the colorectal cancer grading data set and shows excellent performance for the extended colorectal cancer grading set. The performance improvements can be attributed to two main factors: The feature selection and graph augmentation method described here are spatially aware, but overall pixel position independent. Further, the graph size in terms of nodes becomes stable with respect to the model's prediction and accuracy for sufficiently large models. The graph neural network itself consists of three convolutional blocks and linear layers, which is a rather simple design compared to other networks for this application.
Window detection in aerial texture images of the Berlin 3D CityGML Model
Dec 19, 2018
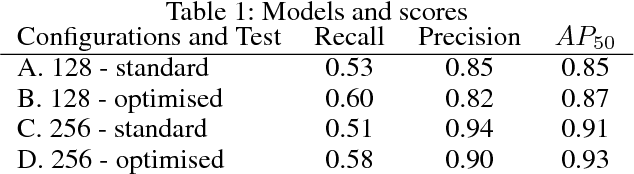
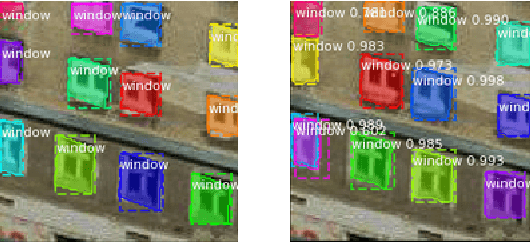
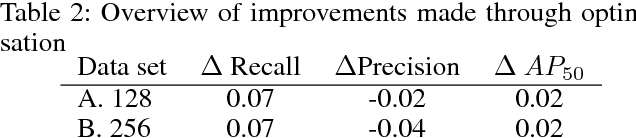
This article explores the usage of the state-of-art neural network Mask R-CNN to be used for window detection of texture files from the CityGML model of Berlin. As texture files are very irregular in terms of size, exposure settings and orientation, we use several parameter optimisation methods to improve the precision. Those textures are cropped from aerial photos, which implies that the angle of the facade, the exposure as well as contrast are calibrated towards the mean and not towards the single facade. The analysis of a single texture image with the human eye itself is challenging: A combination of window and facade estimation and perspective analysis is necessary in order to determine the facades and windows. We train and detect bounding boxes and masks from two data sets with image size 128 and 256. We explore various configuration optimisation methods and the relation of the Region Proposal Network, detected ROIs and the mask output. Our final results shows that the we can improve the average precision scores for both data set sizes, yet the initial AP score varies and leads to different resulting scores.
Filling missing data in point clouds by merging structured and unstructured point clouds
Feb 15, 2017
Point clouds arising from structured data, mainly as a result of CT scans, provides special properties on the distribution of points and the distances between those. Yet often, the amount of data provided can not compare to unstructured point clouds, i.e. data that arises from 3D light scans or laser scans. This article hereby proposes an approach to extend structured data and enhance the quality by inserting selected points from an unstructured point cloud. The resulting point cloud still has a partial structure that is called "half-structure". In this way, missing data that can not be optimally recovered through other surface reconstruction methods can be completed.