 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Secretary Problem with a Stochastic Precursor
May 21, 2026In learning-augmented online algorithms, predictions are usually valued for what they say: a value estimate, a solution, or an algorithmic recommendation. This paper shows that predictions can also be valuable solely due to their arrival time. We study the fundamental secretary problem augmented with a stochastic precursor: a content-free signal that is guaranteed to arrive no later than the best item, but is otherwise stochastically timed. The signal does not carry any additional information; nevertheless, its timing alone changes the structure of optimal stopping. We characterize optimal policies in the random-order and adversarial-order models. In random order, a single uniformly timed precursor already gives success probability at least $\frac12$, improving on the classic $\frac1e$ benchmark. With increasingly late precursors, the success probability approaches $1$. In adversarial order, for which traditional models do not admit strong guarantees, sufficiently concentrated precursors recover constant success guarantees. Our results show that such novel forms of asynchronous temporal information are a distinct and powerful form of advice in online decision making and may also be effective for other problems.
Accelerating Matroid Optimization through Fast Imprecise Oracles
Feb 05, 2024Querying complex models for precise information (e.g. traffic models, database systems, large ML models) often entails intense computations and results in long response times. Thus, weaker models which give imprecise results quickly can be advantageous, provided inaccuracies can be resolved using few queries to a stronger model. In the fundamental problem of computing a maximum-weight basis of a matroid, a well-known generalization of many combinatorial optimization problems, algorithms have access to a clean oracle to query matroid information. We additionally equip algorithms with a fast but dirty oracle modelling an unknown, potentially different matroid. We design and analyze practical algorithms which only use few clean queries w.r.t. the quality of the dirty oracle, while maintaining robustness against arbitrarily poor dirty matroids, approaching the performance of classic algorithms for the given problem. Notably, we prove that our algorithms are, in many respects, best-possible. Further, we outline extensions to other matroid oracle types, non-free dirty oracles and other matroid problems.
Robustification of Online Graph Exploration Methods
Dec 10, 2021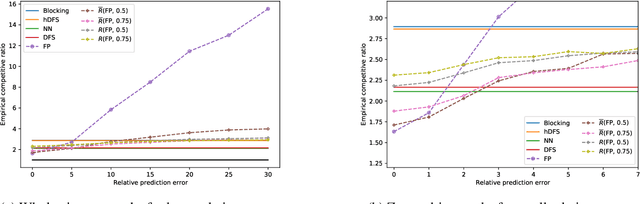
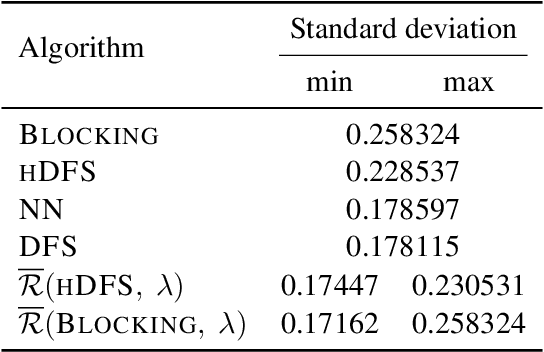
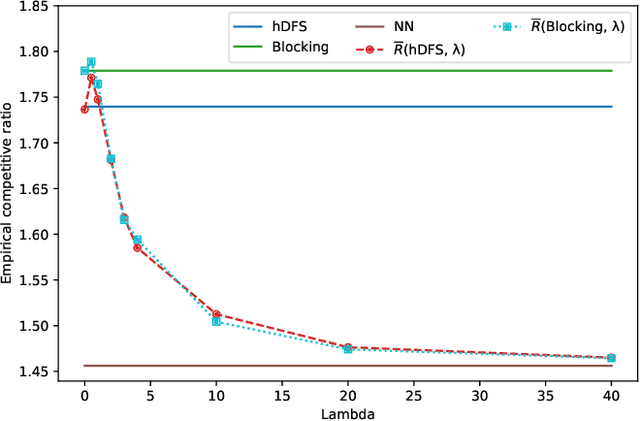
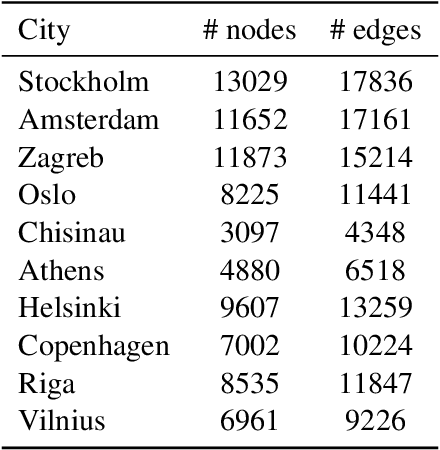
Exploring unknown environments is a fundamental task in many domains, e.g., robot navigation, network security, and internet search. We initiate the study of a learning-augmented variant of the classical, notoriously hard online graph exploration problem by adding access to machine-learned predictions. We propose an algorithm that naturally integrates predictions into the well-known Nearest Neighbor (NN) algorithm and significantly outperforms any known online algorithm if the prediction is of high accuracy while maintaining good guarantees when the prediction is of poor quality. We provide theoretical worst-case bounds that gracefully degrade with the prediction error, and we complement them by computational experiments that confirm our results. Further, we extend our concept to a general framework to robustify algorithms. By interpolating carefully between a given algorithm and NN, we prove new performance bounds that leverage the individual good performance on particular inputs while establishing robustness to arbitrary inputs.