 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Aware Positioning for Improvisational Tasks in Mobile Construction Robots via an AI Agent with Multi-LMM Modules
Mar 24, 2026Due to the ever-changing nature of construction, many tasks on sites occur in an improvisational manner. Existing mobile construction robot studies remain limited in addressing improvisational tasks, where task-required locations, timing of task occurrence, and contextual information required for task execution are not known in advance. We propose an agent that understands improvisational tasks given in natural language, identifies the task-required location, and positions itself. The agent's functionality was decomposed into three Large Multimodal Model (LMM) modules operating in parallel, enabling the application of LMMs for task interpretation and breakdown, construction drawing-based navigation, and visual reasoning to identify non-predefined task-required locations. The agent was implemented with a quadruped robot and achieved a 92.2% success rate for identifying and positioning at task-required locations across three tests designed to assess improvisational task handling. This study enables mobile construction robots to perform non-predefined tasks autonomously.
Data Augmentation Using Adversarial Training for Construction-Equipment Classification
Nov 27, 2019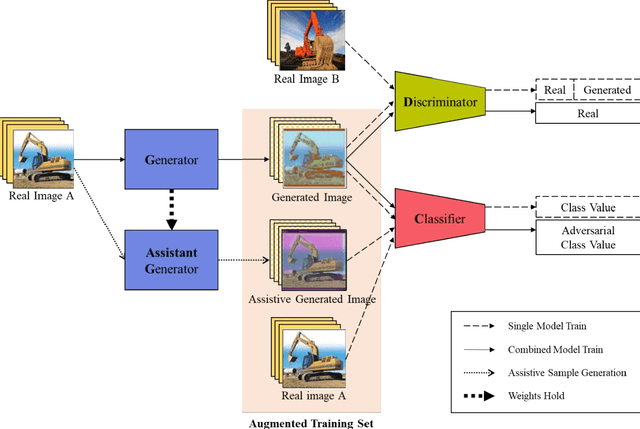
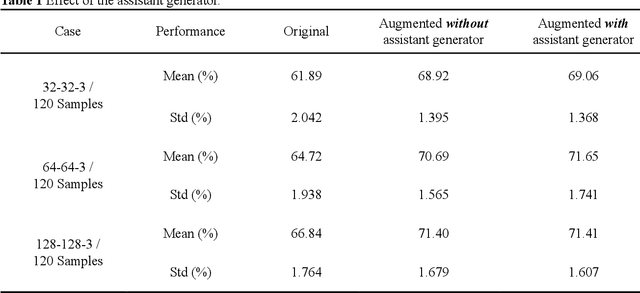
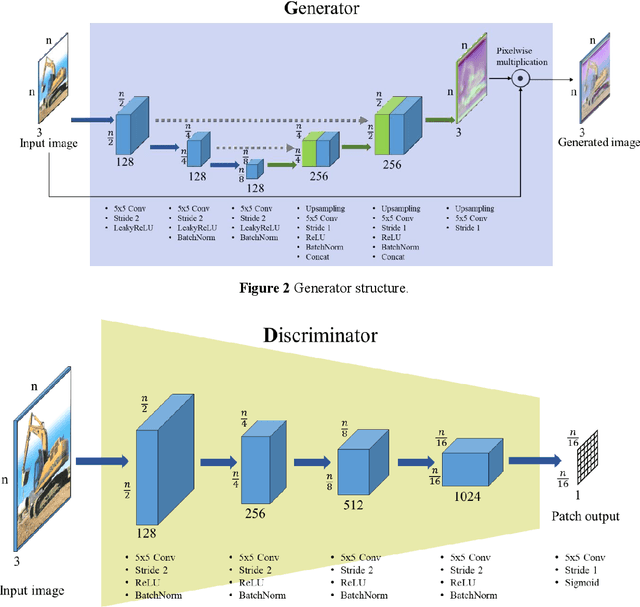
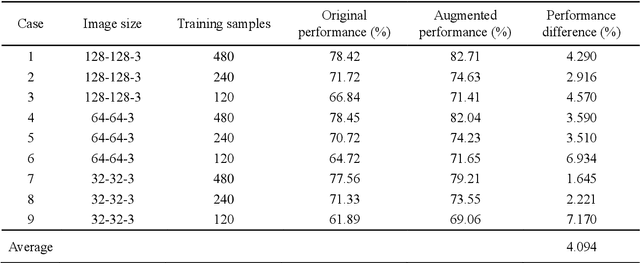
Deep learning-based construction-site image analysis has recently made great progress with regard to accuracy and speed, but it requires a large amount of data. Acquiring sufficient amount of labeled construction-image data is a prerequisite for deep learning-based construction-image recognition and requires considerable time and effort. In this paper, we propose a "data augmentation" scheme based on generative adversarial networks (GANs) for construction-equipment classification. The proposed method combines a GAN and additional "adversarial training" to stably perform "data augmentation" for construction equipment. The "data augmentation" was verified via binary classification experiments involving excavator images, and the average accuracy improvement was 4.094%. In the experiment, three image sizes (32-32-3, 64-64-3, and 128-128-3) and 120, 240, and 480 training samples were used to demonstrate the robustness of the proposed method. These results demonstrated that the proposed method can effectively and reliably generate construction-equipment images and train deep learning-based classifiers for construction equipment.