 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time tightly coupled GNSS and IMU integration via Factor Graph Optimization
Mar 03, 2026Reliable positioning in dense urban environments remains challenging due to frequent GNSS signal blockage, multipath, and rapidly varying satellite geometry. While factor graph optimization (FGO)-based GNSS-IMU fusion has demonstrated strong robustness and accuracy, most formulations remain offline. In this work, we present a real-time tightly coupled GNSS-IMU FGO method that enables causal state estimation via incremental optimization with fixed-lag marginalization, and we evaluate its performance in a highly urbanized GNSS-degraded environment using the UrbanNav dataset.
Real-time loosely coupled GNSS and IMU integration via Factor Graph Optimization
Mar 03, 2026Accurate positioning, navigation, and timing (PNT) is fundamental to the operation of modern technologies and a key enabler of autonomous systems. A very important component of PNT is the Global Navigation Satellite System (GNSS) which ensures outdoor positioning. Modern research directions have pushed the performance of GNSS localization to new heights by fusing GNSS measurements with other sensory information, mainly measurements from Inertial Measurement Units (IMU). In this paper, we propose a loosely coupled architecture to integrate GNSS and IMU measurements using a Factor Graph Optimization (FGO) framework. Because the FGO method can be computationally challenging and often used as a post-processing method, our focus is on assessing its localization accuracy and service availability while operating in real-time in challenging environments (urban canyons). Experimental results on the UrbanNav-HK-MediumUrban-1 dataset show that the proposed approach achieves real-time operation and increased service availability compared to batch FGO methods. While this improvement comes at the cost of reduced positioning accuracy, the paper provides a detailed analysis of the trade-offs between accuracy, availability, and computational efficiency that characterize real-time FGO-based GNSS/IMU fusion.
Dual Unscented Kalman Filter Architecture for Sensor Fusion in Water Networks Leak Localization
Dec 16, 2024



Leakage in water systems results in significant daily water losses, degrading service quality, increasing costs, and aggravating environmental problems. Most leak localization methods rely solely on pressure data, missing valuable information from other sensor types. This article proposes a hydraulic state estimation methodology based on a dual Unscented Kalman Filter (UKF) approach, which enhances the estimation of both nodal hydraulic heads, critical in localization tasks, and pipe flows, useful for operational purposes. The approach enables the fusion of different sensor types, such as pressure, flow and demand meters. The strategy is evaluated in well-known open source case studies, namely Modena and L-TOWN, showing improvements over other state-of-the-art estimation approaches in terms of interpolation accuracy, as well as more precise leak localization performance in L-TOWN.
Nodal Hydraulic Head Estimation through Unscented Kalman Filter for Data-driven Leak Localization in Water Networks
Nov 27, 2023In this paper, we present a nodal hydraulic head estimation methodology for water distribution networks (WDN) based on an Unscented Kalman Filter (UKF) scheme with application to leak localization. The UKF refines an initial estimation of the hydraulic state by considering the prediction model, as well as available pressure and demand measurements. To this end, it provides customized prediction and data assimilation steps. Additionally, the method is enhanced by dynamically updating the prediction function weight matrices. Performance testing on the Modena benchmark under realistic conditions demonstrates the method's effectiveness in enhancing state estimation and data-driven leak localization.
Learning Dictionaries from Physical-Based Interpolation for Water Network Leak Localization
Apr 21, 2023This article presents a leak localization methodology based on state estimation and learning. The first is handled by an interpolation scheme, whereas dictionary learning is considered for the second stage. The novel proposed interpolation technique exploits the physics of the interconnections between hydraulic heads of neighboring nodes in water distribution networks. Additionally, residuals are directly interpolated instead of hydraulic head values. The results of applying the proposed method to a well-known case study (Modena) demonstrated the improvements of the new interpolation method with respect to a state-of-the-art approach, both in terms of interpolation error (considering state and residual estimation) and posterior localization.
Data-driven Leak Localization in Water Distribution Networks via Dictionary Learning and Graph-based Interpolation
Oct 12, 2021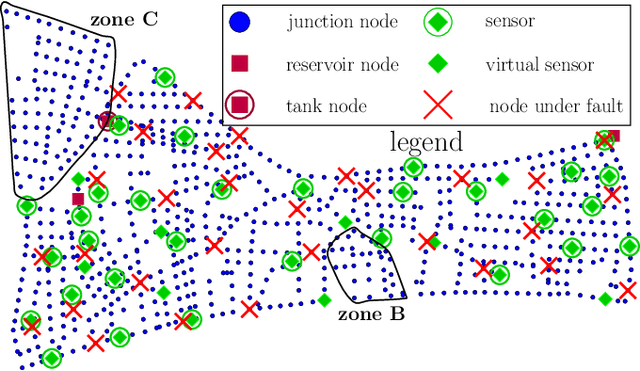
In this paper, we propose a data-driven leak localization method for water distribution networks (WDNs) which combines two complementary approaches: graph-based interpolation and dictionary classification. The former estimates the complete WDN hydraulic state (i.e., hydraulic heads) from real measurements at certain nodes and the network graph. Then, these actual measurements, together with a subset of valuable estimated states, are used to feed and train the dictionary learning scheme. Thus, the meshing of these two methods is explored, showing that its performance is superior to either approach alone, even deriving different mechanisms to increase its resilience to classical problems (e.g., dimensionality, interpolation errors, etc.). The approach is validated using the L-TOWN benchmark proposed at BattLeDIM2020.
Fault Handling in Large Water Networks with Online Dictionary Learning
Mar 18, 2020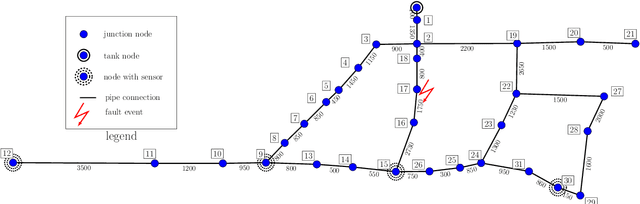
Fault detection and isolation in water distribution networks is an active topic due to its model's mathematical complexity and increased data availability through sensor placement. Here we simplify the model by offering a data driven alternative that takes the network topology into account when performing sensor placement and then proceeds to build a network model through online dictionary learning based on the incoming sensor data. Online learning is fast and allows tackling large networks as it processes small batches of signals at a time and has the benefit of continuous integration of new data into the existing network model, be it in the beginning for training or in production when new data samples are encountered. The algorithms show good performance when tested on both small and large-scale networks.