 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAuto-Assembly: a framework for automated robotic assembly directly from CAD
Jan 06, 2023In this work, we propose a framework called Auto-Assembly for automated robotic assembly from design files and demonstrate a practical implementation on modular parts joined by fastening using a robotic cell consisting of two robots. We show the flexibility of the approach by testing it on different input designs. Auto-Assembly consists of several parts: design analysis, assembly sequence generation, bill-of-process (BOP) generation, conversion of the BOP to control code, path planning, simulation, and execution of the control code to assemble parts in the physical environment.
Sim2Real for Peg-Hole Insertion with Eye-in-Hand Camera
May 29, 2020
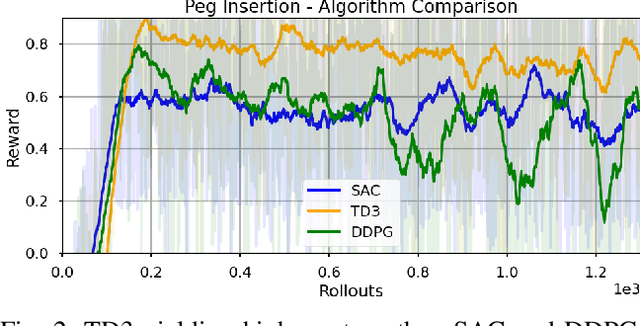

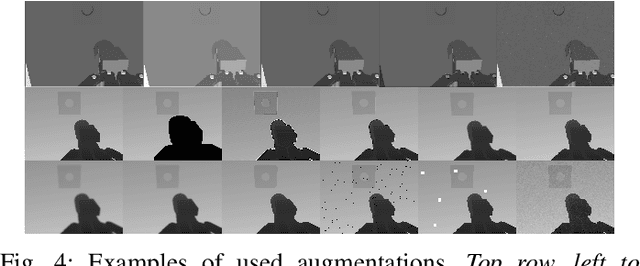
Even though the peg-hole insertion is one of the well-studied problems in robotics, it still remains a challenge for robots, especially when it comes to flexibility and the ability to generalize. Successful completion of the task requires combining several modalities to cope with the complexity of the real world. In our work, we focus on the visual aspect of the problem and employ the strategy of learning an insertion task in a simulator. We use Deep Reinforcement Learning to learn the policy end-to-end and then transfer the learned model to the real robot, without any additional fine-tuning. We show that the transferred policy, which only takes RGB-D and joint information (proprioception) can perform well on the real robot.