 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDimensionality Collapse: Optimal Measurement Selection for Low-Error Infinite-Horizon Forecasting
Mar 27, 2023This work introduces a method to select linear functional measurements of a vector-valued time series optimized for forecasting distant time-horizons. By formulating and solving the problem of sequential linear measurement design as an infinite-horizon problem with the time-averaged trace of the Cram\'{e}r-Rao lower bound (CRLB) for forecasting as the cost, the most informative data can be collected irrespective of the eventual forecasting algorithm. By introducing theoretical results regarding measurements under additive noise from natural exponential families, we construct an equivalent problem from which a local dimensionality reduction can be derived. This alternative formulation is based on the future collapse of dimensionality inherent in the limiting behavior of many differential equations and can be directly observed in the low-rank structure of the CRLB for forecasting. Implementations of both an approximate dynamic programming formulation and the proposed alternative are illustrated using an extended Kalman filter for state estimation, with results on simulated systems with limit cycles and chaotic behavior demonstrating a linear improvement in the CRLB as a function of the number of collapsing dimensions of the system.
Low SNR Multiframe Registration for Cubesats
Feb 26, 2022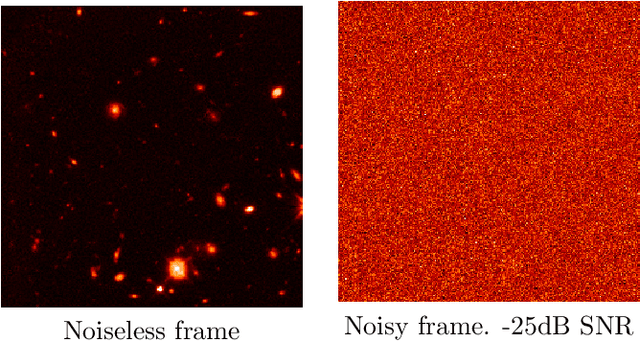
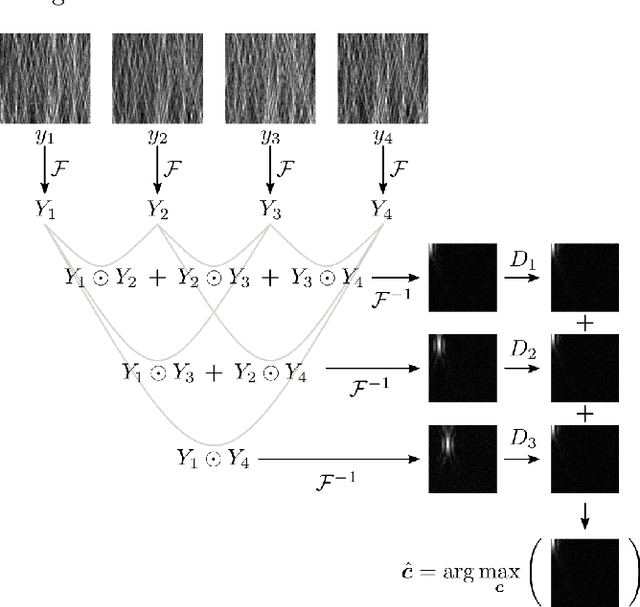
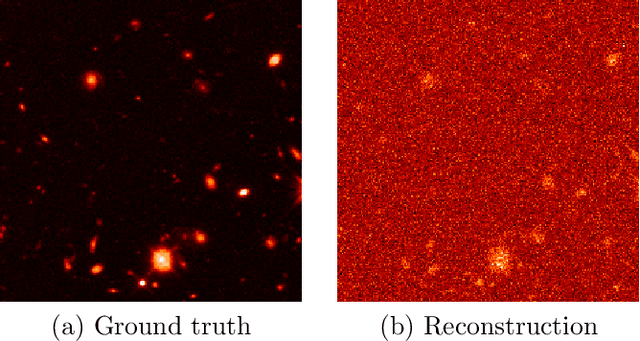
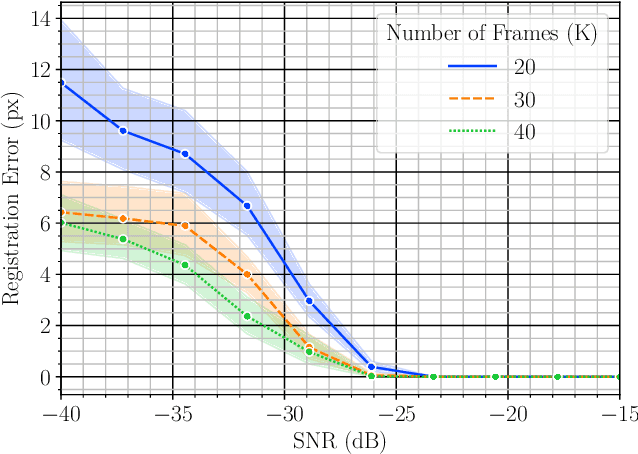
We present a registration algorithm which jointly estimates motion and the ground truth image from a set of noisy frames under rigid, constant translation. The algorithm is non-iterative and needs no hyperparameter tuning. It requires a fixed number of FFT, multiplication, and downsampling operations for a given input size, enabling fast implementation on embedded platforms like cubesats where on-board image fusion can greatly save on limited downlink bandwidth. The algorithm is optimal in the maximum likelihood sense for additive white Gaussian noise and non-stationary Gaussian approximations of Poisson noise. Accurate registration is achieved for very low SNR, even when visible features are below the noise floor.
Spatial-temporal switching estimators for imaging locally concentrated dynamics
Feb 19, 2021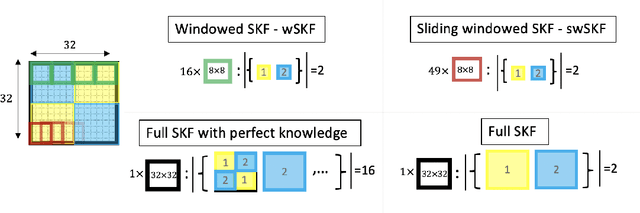
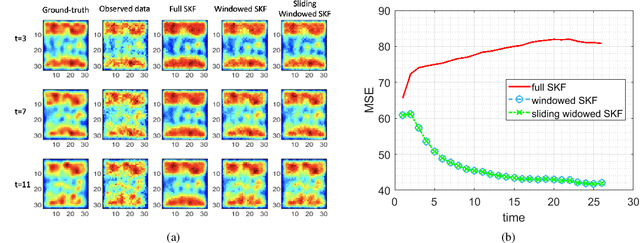
The evolution of images with physics-based dynamics is often spatially localized and nonlinear. A switching linear dynamic system (SLDS) is a natural model under which to pose such problems when the system's evolution randomly switches over the observation interval. Because of the high parameter space dimensionality, efficient and accurate recovery of the underlying state is challenging. The work presented in this paper focuses on the common cases where the dynamic evolution may be adequately modeled as a collection of decoupled, locally concentrated dynamic operators. Patch-based hybrid estimators are proposed for real-time reconstruction of images from noisy measurements given perfect or partial information about the underlying system dynamics. Numerical results demonstrate the effectiveness of the proposed approach for denoising in a realistic data-driven simulation of remotely sensed cloud dynamics.