 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Implementation of an Automated Disaster-recovery System for a Kubernetes Cluster Using LSTM
Feb 05, 2024



With the increasing importance of data in the modern business environment, effective data man-agement and protection strategies are gaining increasing research attention. Data protection in a cloud environment is crucial for safeguarding information assets and maintaining sustainable services. This study introduces a system structure that integrates Kubernetes management plat-forms with backup and restoration tools. This system is designed to immediately detect disasters and automatically recover applications from another kubernetes cluster. The experimental results show that this system executes the restoration process within 15 s without human intervention, enabling rapid recovery. This, in turn, significantly reduces the potential for delays and errors compared with manual recovery processes, thereby enhancing data management and recovery ef-ficiency in cloud environments. Moreover, our research model predicts the CPU utilization of the cluster using Long Short-Term Memory (LSTM). The necessity of scheduling through this predict is made clearer through comparison with experiments without scheduling, demonstrating its ability to prevent performance degradation. This research highlights the efficiency and necessity of automatic recovery systems in cloud environments, setting a new direction for future research.
Factorial Convolution Neural Networks
Nov 13, 2021
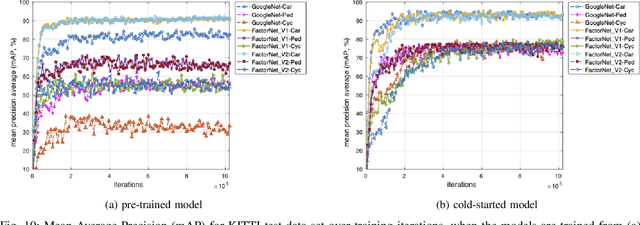
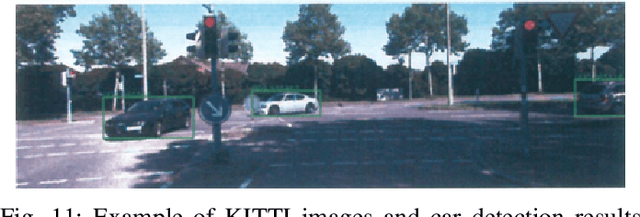
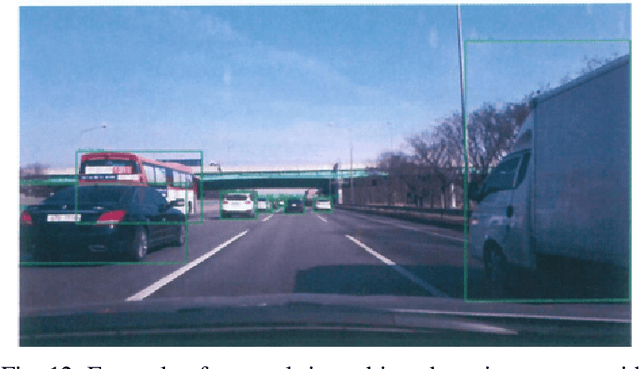
In recent years, GoogleNet has garnered substantial attention as one of the base convolutional neural networks (CNNs) to extract visual features for object detection. However, it experiences challenges of contaminated deep features when concatenating elements with different properties. Also, since GoogleNet is not an entirely lightweight CNN, it still has many execution overheads to apply to a resource-starved application domain. Therefore, a new CNNs, FactorNet, has been proposed to overcome these functional challenges. The FactorNet CNN is composed of multiple independent sub CNNs to encode different aspects of the deep visual features and has far fewer execution overheads in terms of weight parameters and floating-point operations. Incorporating FactorNet into the Faster-RCNN framework proved that FactorNet gives \ignore{a 5\%} better accuracy at a minimum and produces additional speedup over GoolgleNet throughout the KITTI object detection benchmark data set in a real-time object detection system.