 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttribution-based Explanations for Markov Decision Processes
May 10, 2026Attribution techniques explain the outcome of an AI model by assigning a numerical score to its inputs. So far, these techniques have mainly focused on attributing importance to static input features at a single point in time, and thus fail to generalize to sequential decision-making settings. This paper fills this gap by introducing techniques to generate attribution-based explanations for Markov Decision Processes (MDPs). We give a formal characterization of what attributions should represent in MDPs, focusing on explanations that assign importance scores to both individual states and execution paths. We show how importance scores can be computed by leveraging techniques for strategy synthesis, enabling the efficient computation of these scores despite the non-determinism inherent in an MDP. We evaluate our approach on five case-studies, demonstrating its utility in providing interpretable insights into the logic of sequential decision-making agents.
Counterfactual Strategies for Markov Decision Processes
May 14, 2025Counterfactuals are widely used in AI to explain how minimal changes to a model's input can lead to a different output. However, established methods for computing counterfactuals typically focus on one-step decision-making, and are not directly applicable to sequential decision-making tasks. This paper fills this gap by introducing counterfactual strategies for Markov Decision Processes (MDPs). During MDP execution, a strategy decides which of the enabled actions (with known probabilistic effects) to execute next. Given an initial strategy that reaches an undesired outcome with a probability above some limit, we identify minimal changes to the initial strategy to reduce that probability below the limit. We encode such counterfactual strategies as solutions to non-linear optimization problems, and further extend our encoding to synthesize diverse counterfactual strategies. We evaluate our approach on four real-world datasets and demonstrate its practical viability in sophisticated sequential decision-making tasks.
ROSAR: An Adversarial Re-Training Framework for Robust Side-Scan Sonar Object Detection
Oct 14, 2024



This paper introduces ROSAR, a novel framework enhancing the robustness of deep learning object detection models tailored for side-scan sonar (SSS) images, generated by autonomous underwater vehicles using sonar sensors. By extending our prior work on knowledge distillation (KD), this framework integrates KD with adversarial retraining to address the dual challenges of model efficiency and robustness against SSS noises. We introduce three novel, publicly available SSS datasets, capturing different sonar setups and noise conditions. We propose and formalize two SSS safety properties and utilize them to generate adversarial datasets for retraining. Through a comparative analysis of projected gradient descent (PGD) and patch-based adversarial attacks, ROSAR demonstrates significant improvements in model robustness and detection accuracy under SSS-specific conditions, enhancing the model's robustness by up to 1.85%. ROSAR is available at https://github.com/remaro-network/ROSAR-framework.
Knowledge Distillation in YOLOX-ViT for Side-Scan Sonar Object Detection
Mar 14, 2024



In this paper we present YOLOX-ViT, a novel object detection model, and investigate the efficacy of knowledge distillation for model size reduction without sacrificing performance. Focused on underwater robotics, our research addresses key questions about the viability of smaller models and the impact of the visual transformer layer in YOLOX. Furthermore, we introduce a new side-scan sonar image dataset, and use it to evaluate our object detector's performance. Results show that knowledge distillation effectively reduces false positives in wall detection. Additionally, the introduced visual transformer layer significantly improves object detection accuracy in the underwater environment. The source code of the knowledge distillation in the YOLOX-ViT is at https://github.com/remaro-network/KD-YOLOX-ViT.
Extending Neural Network Verification to a Larger Family of Piece-wise Linear Activation Functions
Nov 16, 2023



In this paper, we extend an available neural network verification technique to support a wider class of piece-wise linear activation functions. Furthermore, we extend the algorithms, which provide in their original form exact respectively over-approximative results for bounded input sets represented as start sets, to allow also unbounded input set. We implemented our algorithms and demonstrated their effectiveness in some case studies.
* In Proceedings FMAS 2023, arXiv:2311.08987
On the Synthesis of Guaranteed-Quality Plans for Robot Fleets in Logistics Scenarios via Optimization Modulo Theories
Nov 12, 2017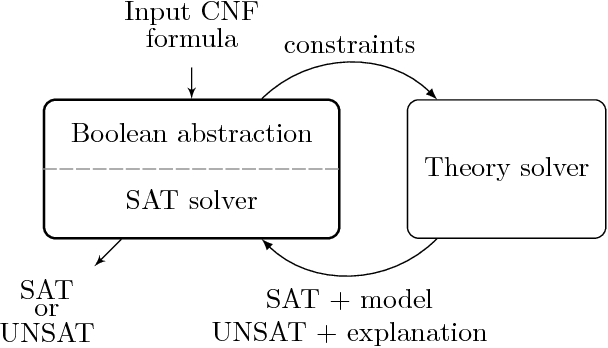

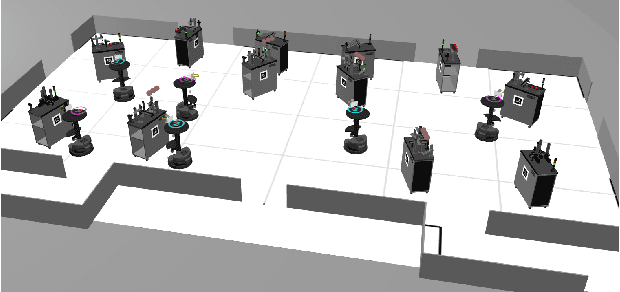
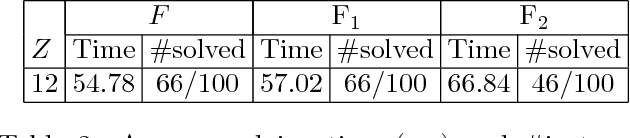
In manufacturing, the increasing involvement of autonomous robots in production processes poses new challenges on the production management. In this paper we report on the usage of Optimization Modulo Theories (OMT) to solve certain multi-robot scheduling problems in this area. Whereas currently existing methods are heuristic, our approach guarantees optimality for the computed solution. We do not only present our final method but also its chronological development, and draw some general observations for the development of OMT-based approaches.