 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLossless Compression of Point Cloud Sequences Using Sequence Optimized CNN Models
Jun 02, 2022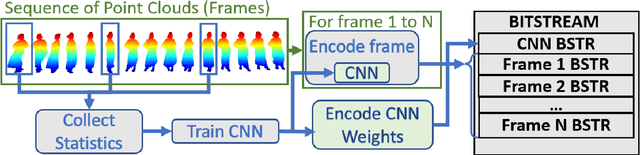
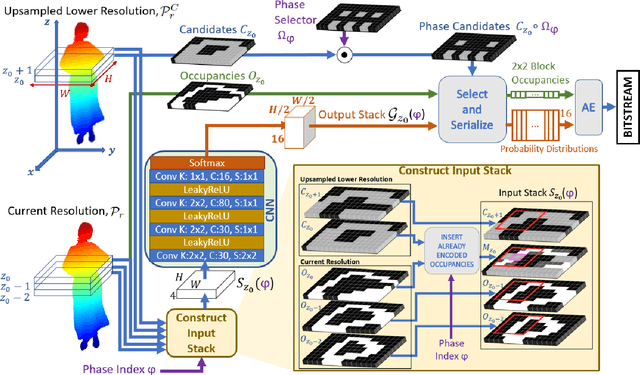
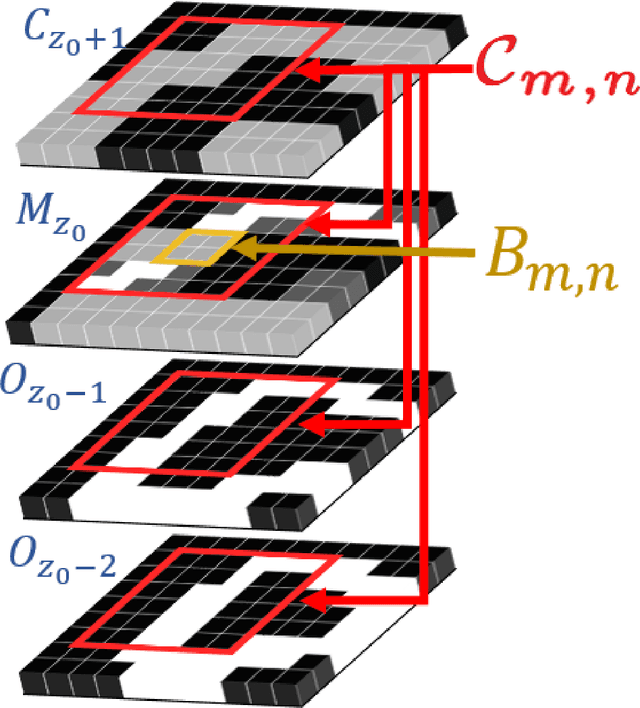
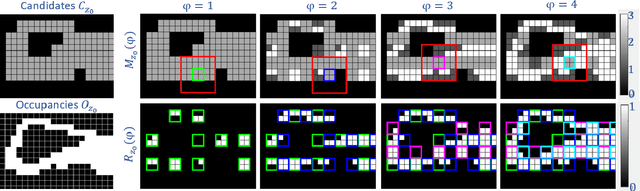
We propose a new paradigm for encoding the geometry of point cloud sequences, where the convolutional neural network (CNN) which estimates the encoding distributions is optimized on several frames of the sequence to be compressed. We adopt lightweight CNN structures, we perform training as part of the encoding process, and the CNN parameters are transmitted as part of the bitstream. The newly proposed encoding scheme operates on the octree representation for each point cloud, encoding consecutively each octree resolution layer. At every octree resolution layer, the voxel grid is traversed section-by-section (each section being perpendicular to a selected coordinate axis) and in each section the occupancies of groups of two-by-two voxels are encoded at once, in a single arithmetic coding operation. A context for the conditional encoding distribution is defined for each two-by-two group of voxels, based on the information available about the occupancy of neighbor voxels in the current and lower resolution layers of the octree. The CNN estimates the probability distributions of occupancy patterns of all voxel groups from one section in four phases. In each new phase the contexts are updated with the occupancies encoded in the previous phase, and each phase estimates the probabilities in parallel, providing a reasonable trade-off between the parallelism of processing and the informativeness of the contexts. The CNN training time is comparable to the time spent in the remaining encoding steps, leading to competitive overall encoding times. Bitrates and encoding-decoding times compare favorably with those of recently published compression schemes.
Neural Network Modeling of Probabilities for Coding the Octree Representation of Point Clouds
Jun 18, 2021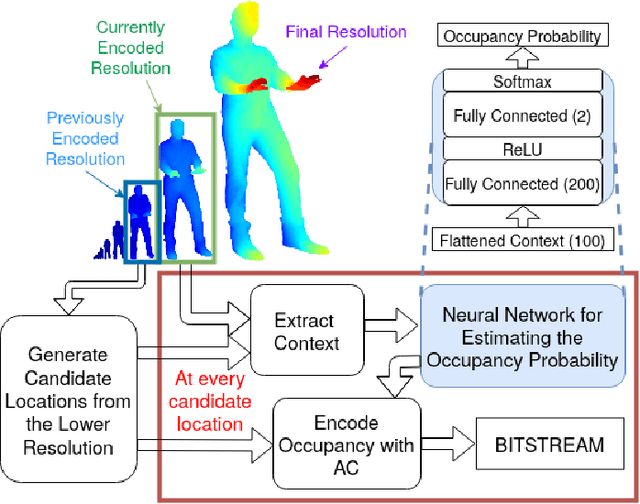
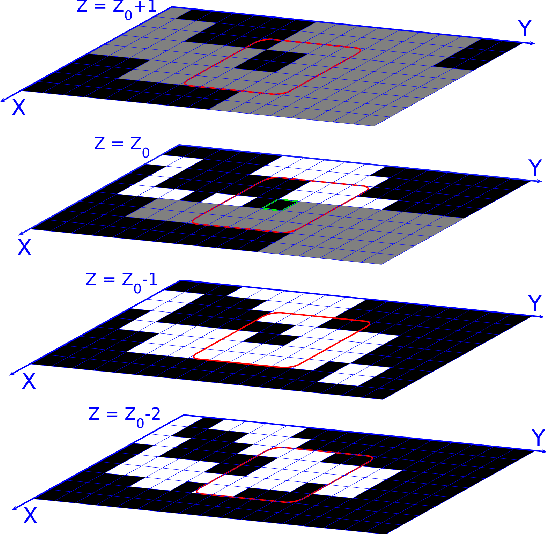
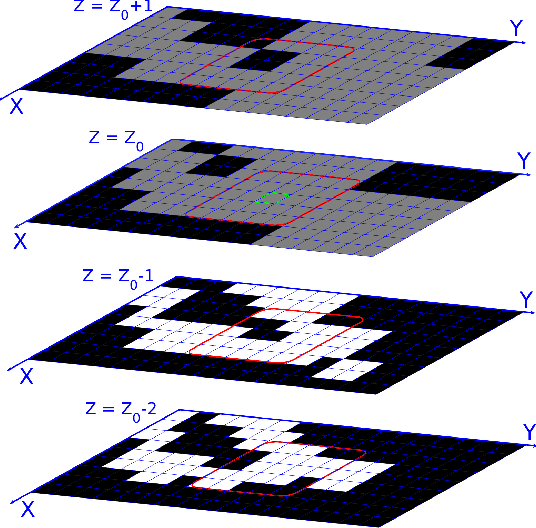
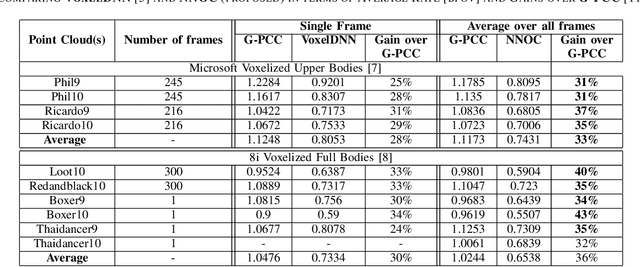
This paper describes a novel lossless point cloud compression algorithm that uses a neural network for estimating the coding probabilities for the occupancy status of voxels, depending on wide three dimensional contexts around the voxel to be encoded. The point cloud is represented as an octree, with each resolution layer being sequentially encoded and decoded using arithmetic coding, starting from the lowest resolution, until the final resolution is reached. The occupancy probability of each voxel of the splitting pattern at each node of the octree is modeled by a neural network, having at its input the already encoded occupancy status of several octree nodes (belonging to the past and current resolutions), corresponding to a 3D context surrounding the node to be encoded. The algorithm has a fast and a slow version, the fast version selecting differently several voxels of the context, which allows an increased parallelization by sending larger batches of templates to be estimated by the neural network, at both encoder and decoder. The proposed algorithms yield state-of-the-art results on benchmark datasets. The implementation will be made available at https://github.com/marmus12/nnctx
Refining the bounding volumes for lossless compression of voxelized point clouds geometry
Jun 01, 2021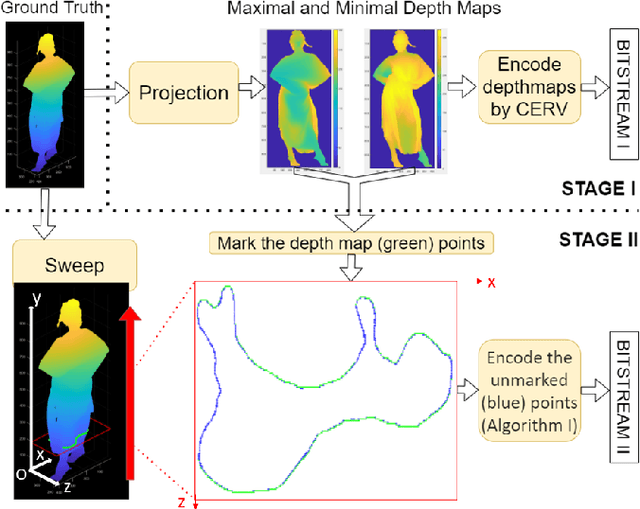
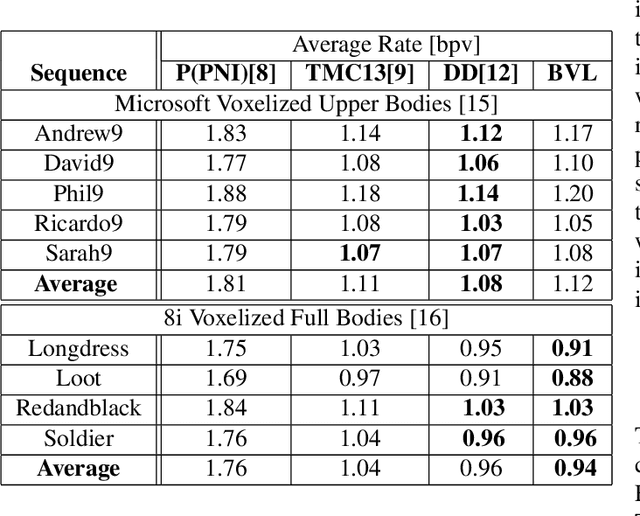
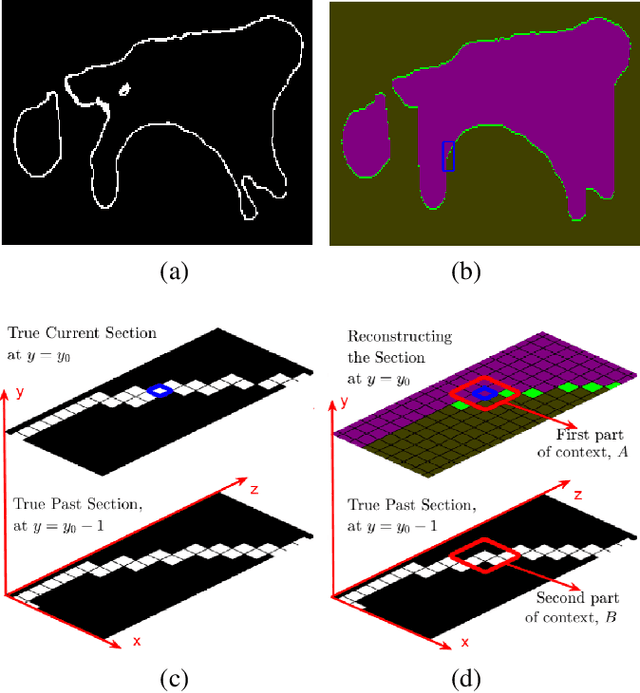
This paper describes a novel lossless compression method for point cloud geometry, building on a recent lossy compression method that aimed at reconstructing only the bounding volume of a point cloud. The proposed scheme starts by partially reconstructing the geometry from the two depthmaps associated to a single projection direction. The partial reconstruction obtained from the depthmaps is completed to a full reconstruction of the point cloud by sweeping section by section along one direction and encoding the points which were not contained in the two depthmaps. The main ingredient is a list-based encoding of the inner points (situated inside the feasible regions) by a novel arithmetic three dimensional context coding procedure that efficiently utilizes rotational invariances present in the input data. State-of-the-art bits-per-voxel results are obtained on benchmark datasets.