 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiMTR: Time Series Motion Prediction for Diverse Road Users through Multimodal Feature Integration
Oct 21, 2024Predicting the behavior of road users accurately is crucial to enable the safe operation of autonomous vehicles in urban or densely populated areas. Therefore, there has been a growing interest in time series motion prediction research, leading to significant advancements in state-of-the-art techniques in recent years. However, the potential of using LiDAR data to capture more detailed local features, such as a person's gaze or posture, remains largely unexplored. To address this, we develop a novel multimodal approach for motion prediction based on the PointNet foundation model architecture, incorporating local LiDAR features. Evaluation on the Waymo Open Dataset shows a performance improvement of 6.20% and 1.58% in minADE and mAP respectively, when integrated and compared with the previous state-of-the-art MTR. We open-source the code of our LiMTR model.
SDS++: Online Situation-Aware Drivable Space Estimation for Automated Driving
Jun 04, 2024



Autonomous Vehicles (AVs) need an accurate and up-to-date representation of the environment for safe navigation. Traditional methods, which often rely on detailed environmental representations constructed offline, struggle in dynamically changing environments or when dealing with outdated maps. Consequently, there is a pressing need for real-time solutions that can integrate diverse data sources and adapt to the current situation. An existing framework that addresses these challenges is SDS (situation-aware drivable space). However, SDS faces several limitations, including its use of a non-standard output representation, its choice of encoding objects as points, restricting representation of more complex geometries like road lanes, and the fact that its methodology has been validated only with simulated or heavily post-processed data. This work builds upon SDS and introduces SDS++, designed to overcome SDS's shortcomings while preserving its benefits. SDS++ has been rigorously validated not only in simulations but also with unrefined vehicle data, and it is integrated with a model predictive control (MPC)-based planner to verify its advantages for the planning task. The results demonstrate that SDS++ significantly enhances trajectory planning capabilities, providing increased robustness against localization noise, and enabling the planning of trajectories that adapt to the current driving context.
Characterization and Mitigation of Insufficiencies in Automated Driving Systems
Apr 15, 2024Automated Driving (AD) systems have the potential to increase safety, comfort and energy efficiency. Recently, major automotive companies have started testing and validating AD systems (ADS) on public roads. Nevertheless, the commercial deployment and wide adoption of ADS have been moderate, partially due to system functional insufficiencies (FI) that undermine passenger safety and lead to hazardous situations on the road. FIs are defined in ISO 21448 Safety Of The Intended Functionality (SOTIF). FIs are insufficiencies in sensors, actuators and algorithm implementations, including neural networks and probabilistic calculations. Examples of FIs in ADS include inaccurate ego-vehicle localization on the road, incorrect prediction of a cyclist maneuver, unreliable detection of a pedestrian, etc. The main goal of our study is to formulate a generic architectural design pattern, which is compatible with existing methods and ADS, to improve FI mitigation and enable faster commercial deployment of ADS. First, we studied the 2021 autonomous vehicles disengagement reports published by the California Department of Motor Vehicles (DMV). The data clearly show that disengagements are five times more often caused by FIs rather than by system faults. We then made a comprehensive list of insufficiencies and their characteristics by analyzing over 10 hours of publicly available road test videos. In particular, we identified insufficiency types in four major categories: world model, motion plan, traffic rule, and operational design domain. The insufficiency characterization helps making the SOTIF analyses of triggering conditions more systematic and comprehensive. Based on our FI characterization, simulation experiments and literature survey, we define a novel generic architectural design pattern Daruma to dynamically select the channel that is least likely to have a FI at the moment.
Prediction Horizon Requirements for Automated Driving: Optimizing Safety, Comfort, and Efficiency
Feb 06, 2024



Predicting the movement of other road users is beneficial for improving automated vehicle (AV) performance. However, the relationship between the time horizon associated with these predictions and AV performance remains unclear. Despite the existence of numerous trajectory prediction algorithms, no studies have been conducted on how varying prediction lengths affect AV safety and other vehicle performance metrics, resulting in undefined horizon requirements for prediction methods. Our study addresses this gap by examining the effects of different prediction horizons on AV performance, focusing on safety, comfort, and efficiency. Through multiple experiments using a state-of-the-art, risk-based predictive trajectory planner, we simulated predictions with horizons up to 20 seconds. Based on our simulations, we propose a framework for specifying the minimum required and optimal prediction horizons based on specific AV performance criteria and application needs. Our results indicate that a horizon of 1.6 seconds is required to prevent collisions with crossing pedestrians, horizons of 7-8 seconds yield the best efficiency, and horizons up to 15 seconds improve passenger comfort. We conclude that prediction horizon requirements are application-dependent, and recommend aiming for a prediction horizon of 11.8 seconds as a general guideline for applications involving crossing pedestrians.
Overcoming the Fear of the Dark: Occlusion-Aware Model-Predictive Planning for Automated Vehicles Using Risk Fields
Sep 27, 2023



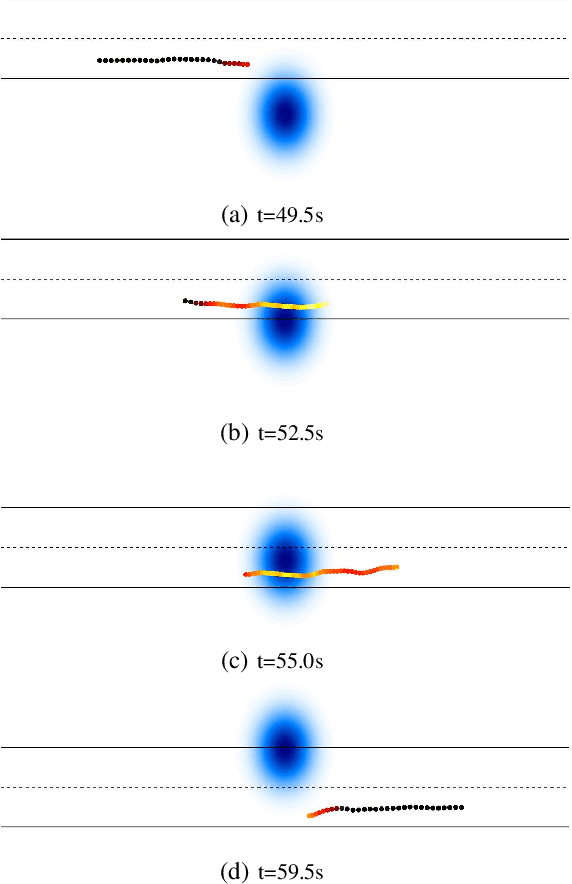
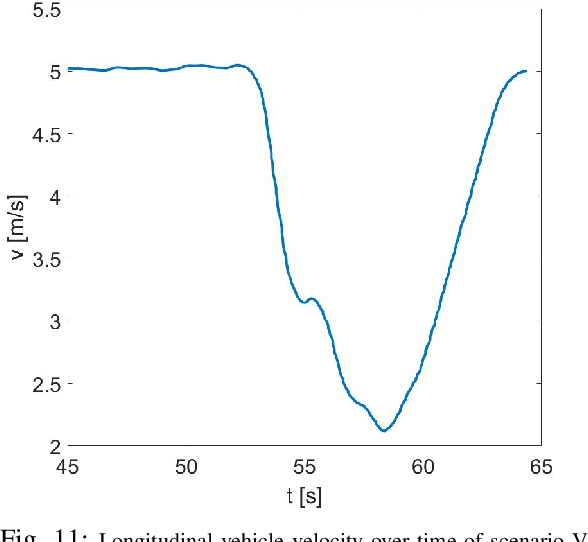
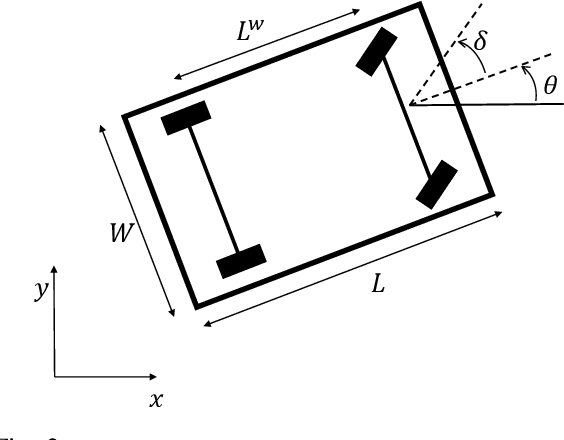
As vehicle automation advances, motion planning algorithms face escalating challenges in achieving safe and efficient navigation. Existing Advanced Driver Assistance Systems (ADAS) primarily focus on basic tasks, leaving unexpected scenarios for human intervention, which can be error-prone. Motion planning approaches for higher levels of automation in the state-of-the-art are primarily oriented toward the use of risk- or anti-collision constraints, using over-approximates of the shapes and sizes of other road users to prevent collisions. These methods however suffer from conservative behavior and the risk of infeasibility in high-risk initial conditions. In contrast, our work introduces a novel multi-objective trajectory generation approach. We propose an innovative method for constructing risk fields that accommodates diverse entity shapes and sizes, which allows us to also account for the presence of potentially occluded objects. This methodology is integrated into an occlusion-aware trajectory generator, enabling dynamic and safe maneuvering through intricate environments while anticipating (potentially hidden) road users and traveling along the infrastructure toward a specific goal. Through theoretical underpinnings and simulations, we validate the effectiveness of our approach. This paper bridges crucial gaps in motion planning for automated vehicles, offering a pathway toward safer and more adaptable autonomous navigation in complex urban contexts.
Robustness Benchmark of Road User Trajectory Prediction Models for Automated Driving
Apr 04, 2023Accurate and robust trajectory predictions of road users are needed to enable safe automated driving. To do this, machine learning models are often used, which can show erratic behavior when presented with previously unseen inputs. In this work, two environment-aware models (MotionCNN and MultiPath++) and two common baselines (Constant Velocity and an LSTM) are benchmarked for robustness against various perturbations that simulate functional insufficiencies observed during model deployment in a vehicle: unavailability of road information, late detections, and noise. Results show significant performance degradation under the presence of these perturbations, with errors increasing up to +1444.8\% in commonly used trajectory prediction evaluation metrics. Training the models with similar perturbations effectively reduces performance degradation, with error increases of up to +87.5\%. We argue that despite being an effective mitigation strategy, data augmentation through perturbations during training does not guarantee robustness towards unforeseen perturbations, since identification of all possible on-road complications is unfeasible. Furthermore, degrading the inputs sometimes leads to more accurate predictions, suggesting that the models are unable to learn the true relationships between the different elements in the data.
Informed sampling-based trajectory planner for automated driving in dynamic urban environments
Oct 05, 2022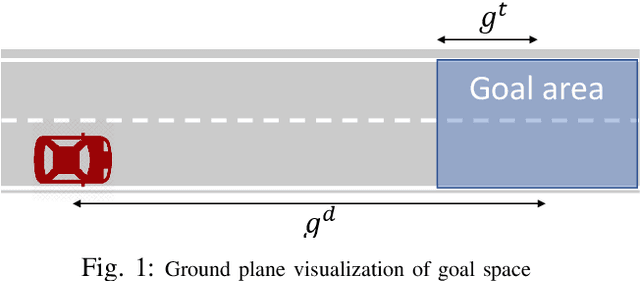
The urban environment is amongst the most difficult domains for autonomous vehicles. The vehicle must be able to plan a safe route on challenging road layouts, in the presence of various dynamic traffic participants such as vehicles, cyclists and pedestrians and in various environmental conditions. The challenge remains to have motion planners that are computationally fast and that account for future movements of other road users proactively. This paper describes an computationally efficient sampling-based trajectory planner for safe and comfortable driving in urban environments. The planner improves the Stable-Sparse-RRT algorithm by adding initial exploration branches to the search tree based on road layout information and reiterating the previous solution. Furthermore, the trajectory planner accounts for the predicted motion of other traffic participants to allow for safe driving in urban traffic. Simulation studies show that the planner is capable of planning collision-free, comfortable trajectories in several urban traffic scenarios. Adding the domain-knowledge-based exploration branches increases the efficiency of exploration of highly interesting areas, thereby increasing the overall planning performance.