 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerified Probabilistic Policies for Deep Reinforcement Learning
Jan 10, 2022
Deep reinforcement learning is an increasingly popular technique for synthesising policies to control an agent's interaction with its environment. There is also growing interest in formally verifying that such policies are correct and execute safely. Progress has been made in this area by building on existing work for verification of deep neural networks and of continuous-state dynamical systems. In this paper, we tackle the problem of verifying probabilistic policies for deep reinforcement learning, which are used to, for example, tackle adversarial environments, break symmetries and manage trade-offs. We propose an abstraction approach, based on interval Markov decision processes, that yields probabilistic guarantees on a policy's execution, and present techniques to build and solve these models using abstract interpretation, mixed-integer linear programming, entropy-based refinement and probabilistic model checking. We implement our approach and illustrate its effectiveness on a selection of reinforcement learning benchmarks.
Probabilistic Guarantees for Safe Deep Reinforcement Learning
May 14, 2020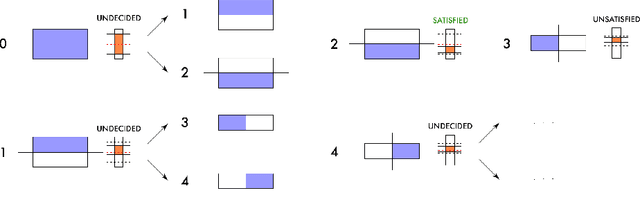
Deep reinforcement learning has been successfully applied to many control tasks, but the application of such agents in safety-critical scenarios has been limited due to safety concerns. Rigorous testing of these controllers is challenging, particularly when they operate in probabilistic environments due to, for example, hardware faults or noisy sensors. We propose MOSAIC, an algorithm for measuring the safety of deep reinforcement learning agents in stochastic settings. Our approach is based on the iterative construction of a formal abstraction of a controller's execution in an environment, and leverages probabilistic model checking of Markov decision processes to produce probabilistic guarantees on safe behaviour over a finite time horizon. It produces bounds on the probability of safe operation of the controller for different initial configurations and identifies regions where correct behaviour can be guaranteed. We implement and evaluate our approach on agents trained for several benchmark control problems.