 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
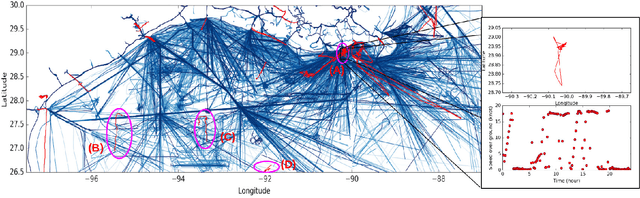
Add to EdgeDetection of Abnormal Vessel Behaviours from AIS data using GeoTrackNet: from the Laboratory to the Ocean
Aug 12, 2020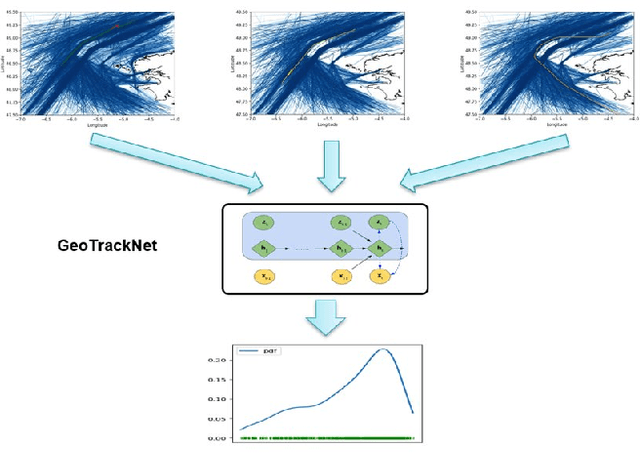
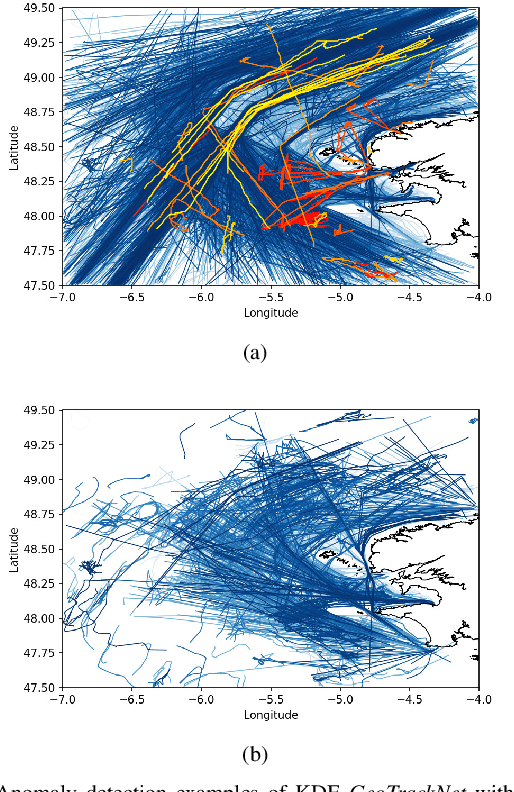
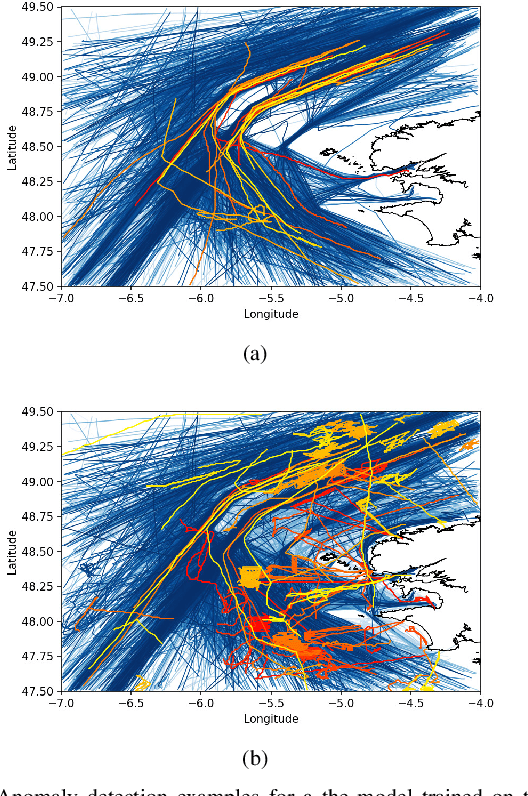
The constant growth of maritime traffic leads to the need of automatic anomaly detection, which has been attracting great research attention. Information provided by AIS (Automatic Identification System) data, together with recent outstanding progresses of deep learning, make vessel monitoring using neural networks (NNs) a very promising approach. This paper analyses a novel neural network we have recently introduced -- GeoTrackNet -- regarding operational contexts. Especially, we aim to evaluate (i) the relevance of the abnormal behaviours detected by GeoTrackNet with respect to expert interpretations, (ii) the extent to which GeoTrackNet may process AIS data streams in real time. We report experiments showing the high potential to meet operational levels of the model.
Neuroevolution of Self-Interpretable Agents
Apr 02, 2020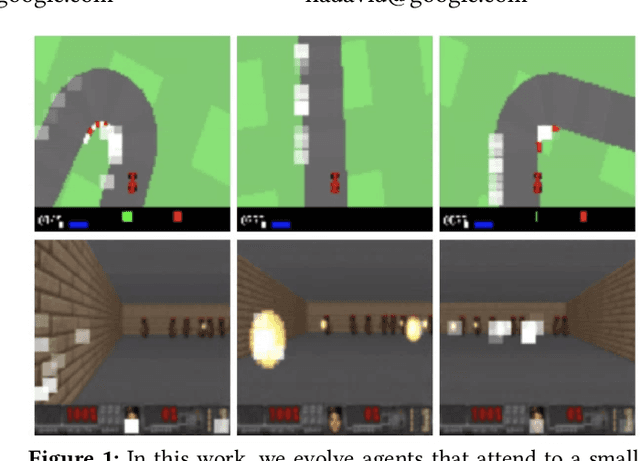
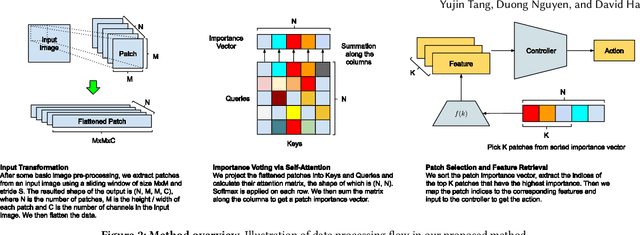
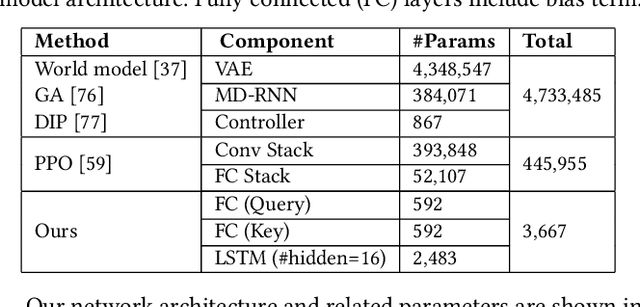
Inattentional blindness is the psychological phenomenon that causes one to miss things in plain sight. It is a consequence of the selective attention in perception that lets us remain focused on important parts of our world without distraction from irrelevant details. Motivated by selective attention, we study the properties of artificial agents that perceive the world through the lens of a self-attention bottleneck. By constraining access to only a small fraction of the visual input, we show that their policies are directly interpretable in pixel space. We find neuroevolution ideal for training self-attention architectures for vision-based reinforcement learning (RL) tasks, allowing us to incorporate modules that can include discrete, non-differentiable operations which are useful for our agent. We argue that self-attention has similar properties as indirect encoding, in the sense that large implicit weight matrices are generated from a small number of key-query parameters, thus enabling our agent to solve challenging vision based tasks with at least 1000x fewer parameters than existing methods. Since our agent attends to only task critical visual hints, they are able to generalize to environments where task irrelevant elements are modified while conventional methods fail. Videos of our results and source code available at https://attentionagent.github.io/
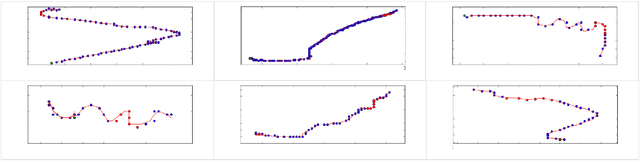
GeoTrackNet-A Maritime Anomaly Detector using Probabilistic Neural Network Representation of AIS Tracks and A Contrario Detection
Dec 02, 2019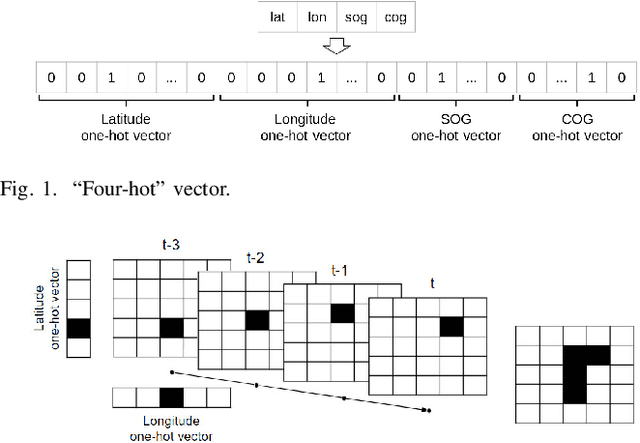
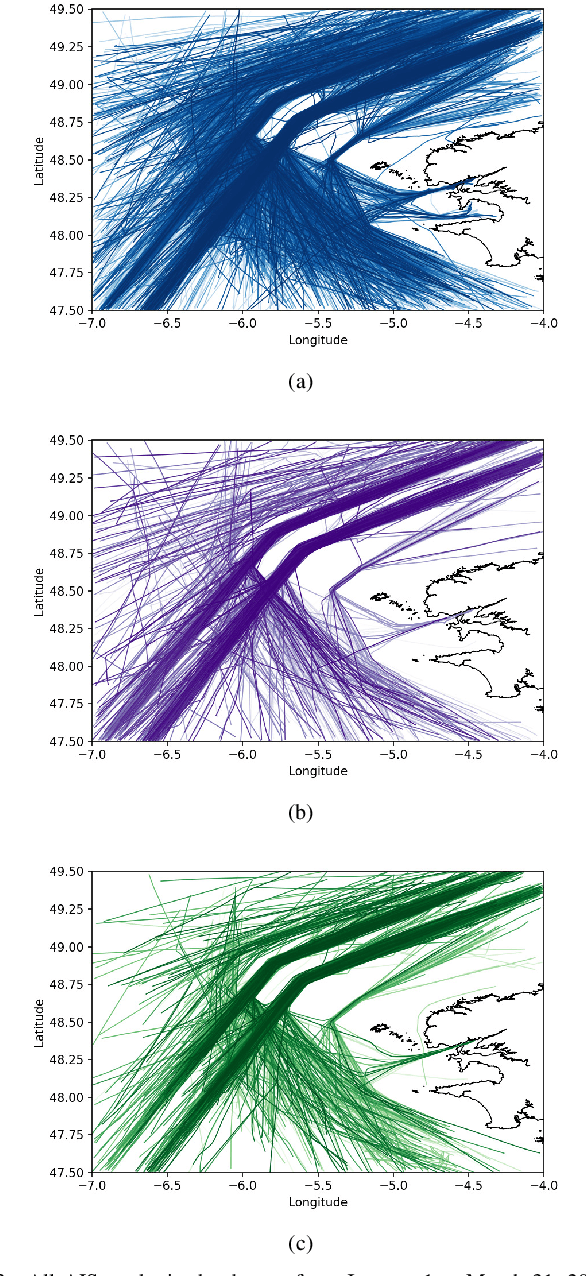
Representing maritime traffic patterns and detecting anomalies from them are key to vessel monitoring and maritime situational awareness. We propose a novel approach-referred to as GeoTrackNet-for maritime anomaly detection from AIS data streams. Our model exploits state-of-the-art neural network schemes to learn a probabilistic representation of AIS tracks, then uses a contrario detection to detect abnormal events. The neural network helps us capture complex and heterogeneous patterns in vessels' behaviors, while the a contrario detection takes into account the fact that the learned distribution may be location-dependent. Experiments on a real AIS dataset comprising more than 4.2 million AIS messages demonstrate the relevance of the proposed method. Keywords: AIS, maritime surveillance, deep learning, anomaly detection, variational recurrent neural networks, a contrario detection.
Learning Latent Dynamics for Partially-Observed Chaotic Systems
Jul 04, 2019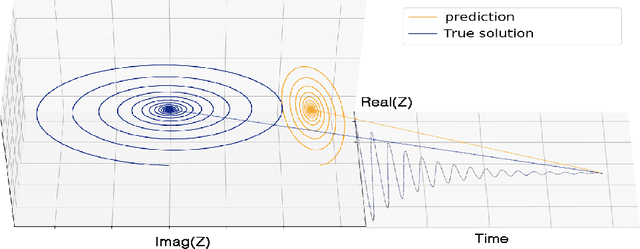
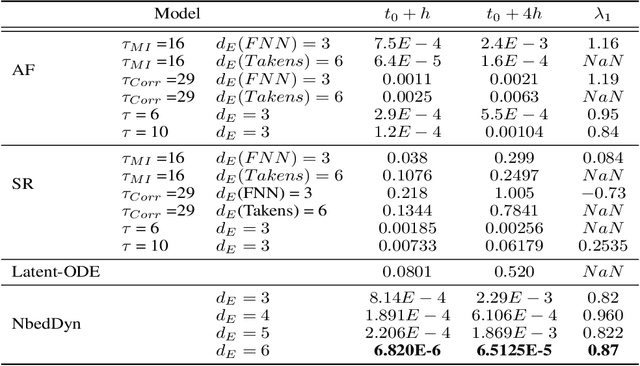
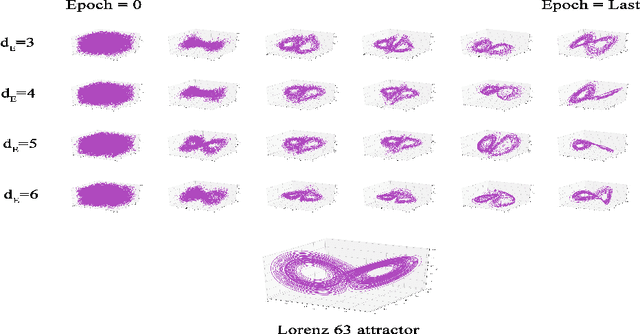
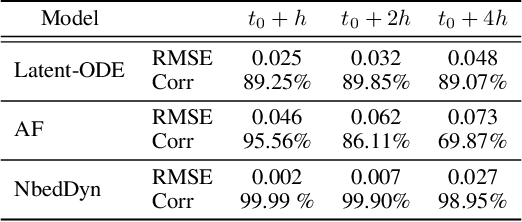
This paper addresses the data-driven identification of latent dynamical representations of partially-observed systems, i.e., dynamical systems for which some components are never observed, with an emphasis on forecasting applications, including long-term asymptotic patterns. Whereas state-of-the-art data-driven approaches rely on delay embeddings and linear decompositions of the underlying operators, we introduce a framework based on the data-driven identification of an augmented state-space model using a neural-network-based representation. For a given training dataset, it amounts to jointly learn an ODE (Ordinary Differential Equation) representation in the latent space and reconstructing latent states. Through numerical experiments, we demonstrate the relevance of the proposed framework w.r.t. state-of-the-art approaches in terms of short-term forecasting performance and long-term behaviour. We further discuss how the proposed framework relates to Koopman operator theory and Takens' embedding theorem.
EM-like Learning Chaotic Dynamics from Noisy and Partial Observations
Mar 25, 2019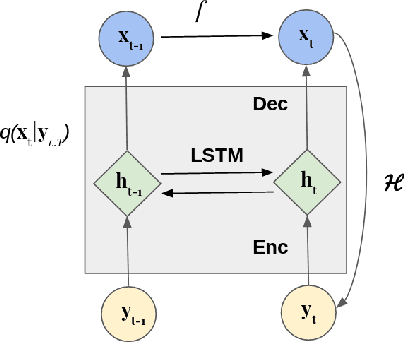
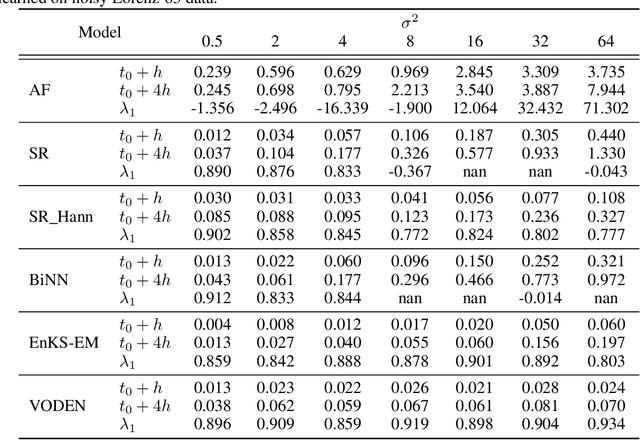
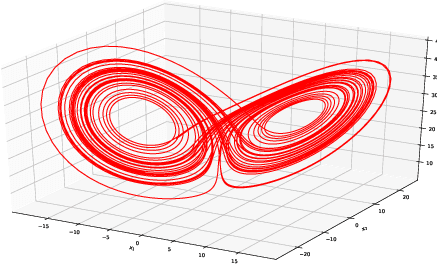
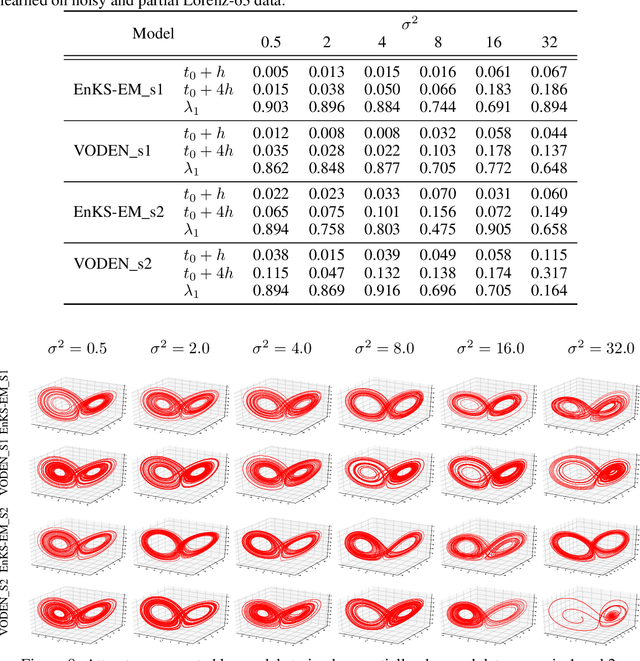
The identification of the governing equations of chaotic dynamical systems from data has recently emerged as a hot topic. While the seminal work by Brunton et al. reported proof-of-concepts for idealized observation setting for fully-observed systems, {\em i.e.} large signal-to-noise ratios and high-frequency sampling of all system variables, we here address the learning of data-driven representations of chaotic dynamics for partially-observed systems, including significant noise patterns and possibly lower and irregular sampling setting. Instead of considering training losses based on short-term prediction error like state-of-the-art learning-based schemes, we adopt a Bayesian formulation and state this issue as a data assimilation problem with unknown model parameters. To solve for the joint inference of the hidden dynamics and of model parameters, we combine neural-network representations and state-of-the-art assimilation schemes. Using iterative Expectation-Maximization (EM)-like procedures, the key feature of the proposed inference schemes is the derivation of the posterior of the hidden dynamics. Using a neural-network-based Ordinary Differential Equation (ODE) representation of these dynamics, we investigate two strategies: their combination to Ensemble Kalman Smoothers and Long Short-Term Memory (LSTM)-based variational approximations of the posterior. Through numerical experiments on the Lorenz-63 system with different noise and time sampling settings, we demonstrate the ability of the proposed schemes to recover and reproduce the hidden chaotic dynamics, including their Lyapunov characteristic exponents, when classic machine learning approaches fail.
Recurrent Neural Networks with Stochastic Layers for Acoustic Novelty Detection
Feb 13, 2019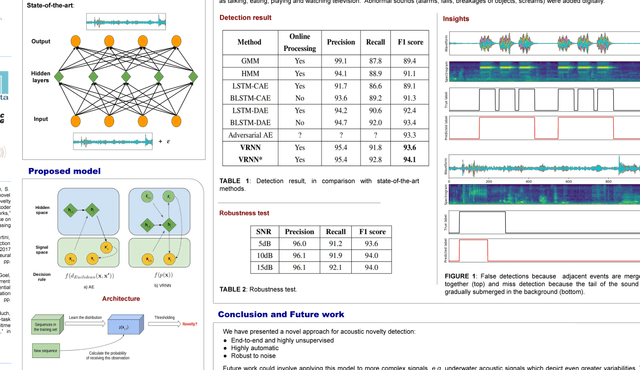
In this paper, we adapt Recurrent Neural Networks with Stochastic Layers, which are the state-of-the-art for generating text, music and speech, to the problem of acoustic novelty detection. By integrating uncertainty into the hidden states, this type of network is able to learn the distribution of complex sequences. Because the learned distribution can be calculated explicitly in terms of probability, we can evaluate how likely an observation is then detect low-probability events as novel. The model is robust, highly unsupervised, end-to-end and requires minimum preprocessing, feature engineering or hyperparameter tuning. An experiment on a benchmark dataset shows that our model outperforms the state-of-the-art acoustic novelty detectors.
BiasedWalk: Biased Sampling for Representation Learning on Graphs
Sep 07, 2018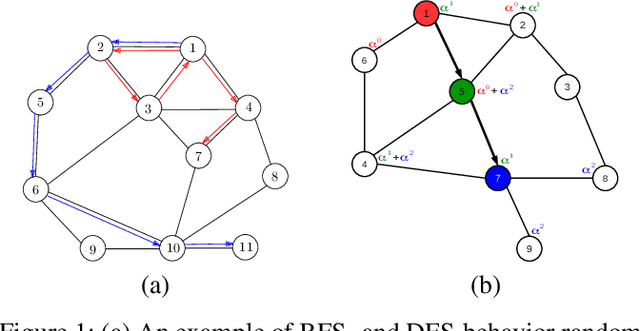
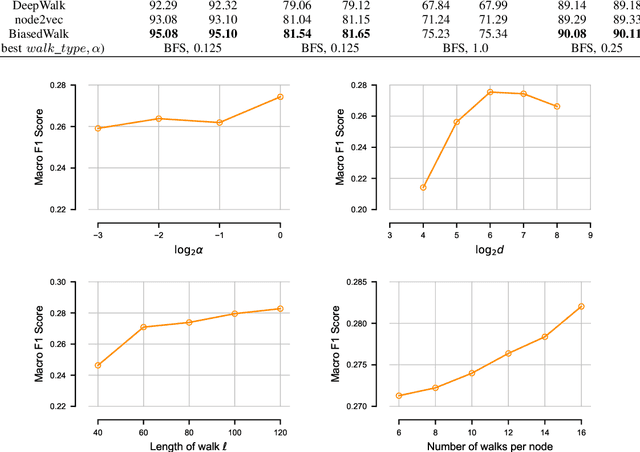
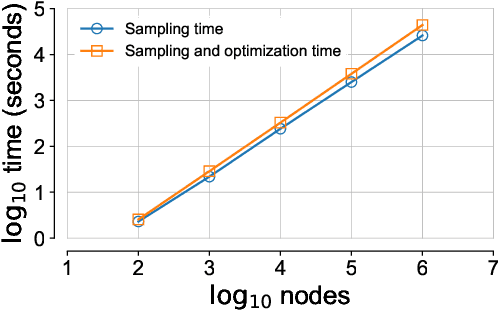
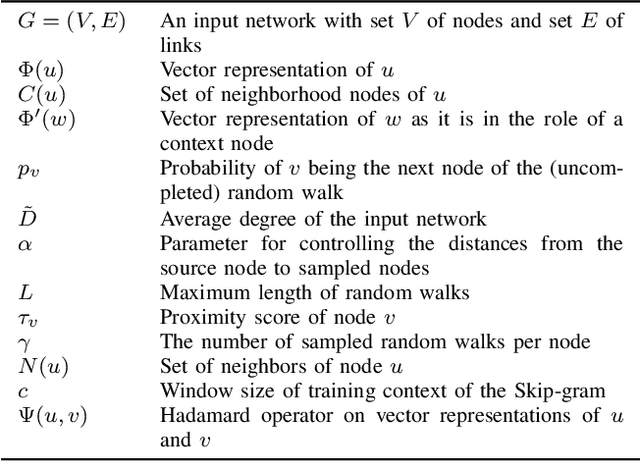
Network embedding algorithms are able to learn latent feature representations of nodes, transforming networks into lower dimensional vector representations. Typical key applications, which have effectively been addressed using network embeddings, include link prediction, multilabel classification and community detection. In this paper, we propose BiasedWalk, a scalable, unsupervised feature learning algorithm that is based on biased random walks to sample context information about each node in the network. Our random-walk based sampling can behave as Breath-First-Search (BFS) and Depth-First-Search (DFS) samplings with the goal to capture homophily and role equivalence between the nodes in the network. We have performed a detailed experimental evaluation comparing the performance of the proposed algorithm against various baseline methods, on several datasets and learning tasks. The experiment results show that the proposed method outperforms the baseline ones in most of the tasks and datasets.
A Multi-task Deep Learning Architecture for Maritime Surveillance using AIS Data Streams
Aug 07, 2018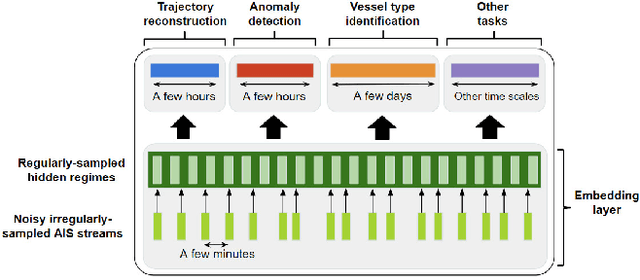
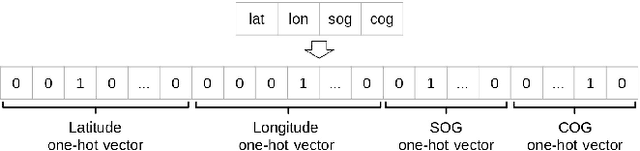
In a world of global trading, maritime safety, security and efficiency are crucial issues. We propose a multi-task deep learning framework for vessel monitoring using Automatic Identification System (AIS) data streams. We combine recurrent neural networks with latent variable modeling and an embedding of AIS messages to a new representation space to jointly address key issues to be dealt with when considering AIS data streams: massive amount of streaming data, noisy data and irregular timesampling. We demonstrate the relevance of the proposed deep learning framework on real AIS datasets for a three-task setting, namely trajectory reconstruction, anomaly detection and vessel type identification.