 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Semantic Image Communication for Traffic Monitoring at the Edge
Apr 14, 2026Many visual monitoring systems operate under strict communication constraints, where transmitting full-resolution images is impractical and often unnecessary. In such settings, visual data is often used for object presence, spatial relationships, and scene context rather than exact pixel fidelity. This paper presents two semantic image communication pipelines for traffic monitoring, MMSD and SAMR, that reduce transmission cost while preserving meaningful visual information. MMSD (Multi-Modal Semantic Decomposition) targets very high compression together with data confidentiality, since sensitive pixel content is not transmitted. It replaces the original image with compact semantic representations, namely segmentation maps, edge maps, and textual descriptions, and reconstructs the scene at the receiver using a diffusion-based generative model. SAMR (Semantic-Aware Masking Reconstruction) targets higher visual quality while maintaining strong compression. It selectively suppresses non-critical image regions according to semantic importance before standard JPEG encoding and restores the missing content at the receiver through generative inpainting. Both designs follow an asymmetric sender-receiver architecture, where lightweight processing is performed at the edge and computationally intensive reconstruction is offloaded to the server. On a Raspberry Pi~5, the edge-side processing time is about 15s for MMSD and 9s for SAMR. Experimental results show average transmitted-data reductions of 99% for MMSD and 99.1% for SAMR. In addition, MMSD achieves lower payload size than the recent SPIC baseline while preserving strong semantic consistency, whereas SAMR provides a better quality-compression trade-off than standard JPEG and SQ-GAN under comparable operating conditions.
Modeling the power consumption of a Wifibot and studying the role of communication cost in operation time
Dec 14, 2015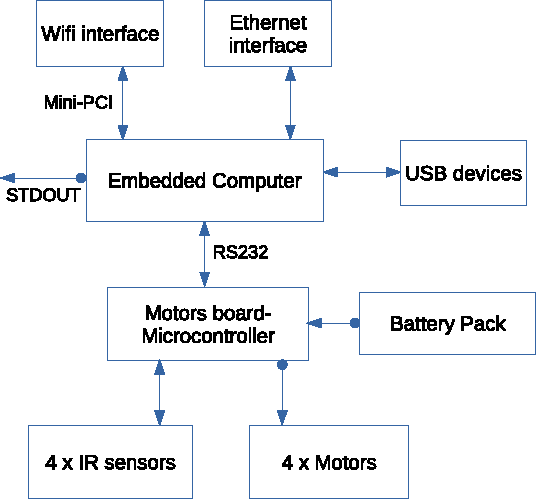



Mobile robots are becoming part of our every day living at home, work or entertainment. Due to their limited power capabilities, the development of new energy consumption models can lead to energy conservation and energy efficient designs. In this paper, we carry out a number of experiments and we focus on the motors power consumption of a specific robot called Wifibot. Based on the experimentation results, we build models for different speed and acceleration levels. We compare the motors power consumption to other robot running modes. We, also, create a simple robot network scenario and we investigate whether forwarding data through a closer node could lead to longer operation times. We assess the effect energy capacity, traveling distance and data rate on the operation time.