 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanoptic Segmentation Meets Remote Sensing
Nov 30, 2021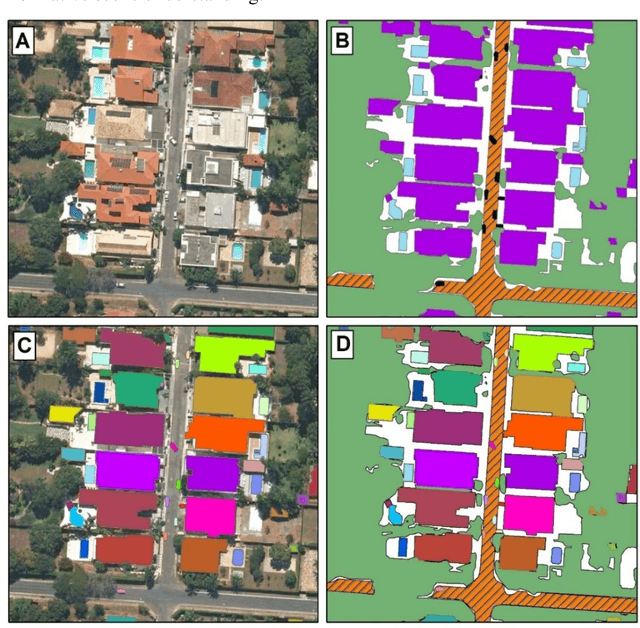
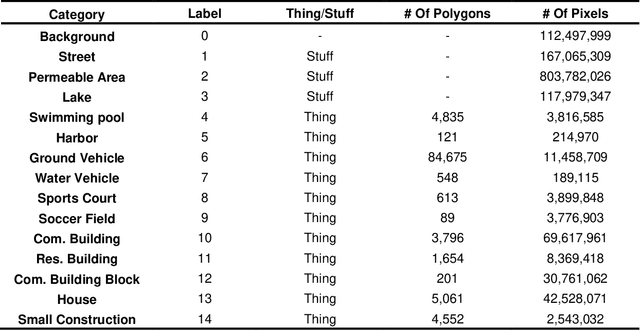
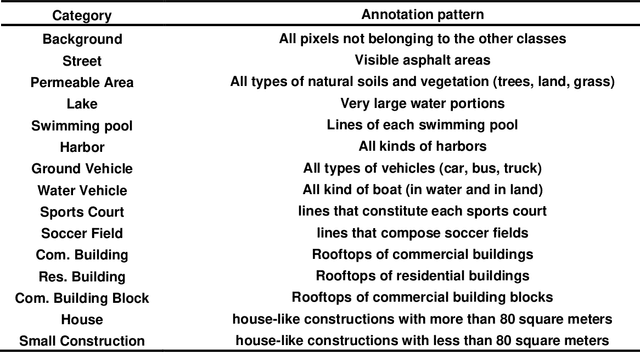
Panoptic segmentation combines instance and semantic predictions, allowing the detection of "things" and "stuff" simultaneously. Effectively approaching panoptic segmentation in remotely sensed data can be auspicious in many challenging problems since it allows continuous mapping and specific target counting. Several difficulties have prevented the growth of this task in remote sensing: (a) most algorithms are designed for traditional images, (b) image labelling must encompass "things" and "stuff" classes, and (c) the annotation format is complex. Thus, aiming to solve and increase the operability of panoptic segmentation in remote sensing, this study has five objectives: (1) create a novel data preparation pipeline for panoptic segmentation, (2) propose an annotation conversion software to generate panoptic annotations; (3) propose a novel dataset on urban areas, (4) modify the Detectron2 for the task, and (5) evaluate difficulties of this task in the urban setting. We used an aerial image with a 0,24-meter spatial resolution considering 14 classes. Our pipeline considers three image inputs, and the proposed software uses point shapefiles for creating samples in the COCO format. Our study generated 3,400 samples with 512x512 pixel dimensions. We used the Panoptic-FPN with two backbones (ResNet-50 and ResNet-101), and the model evaluation considered semantic instance and panoptic metrics. We obtained 93.9, 47.7, and 64.9 for the mean IoU, box AP, and PQ. Our study presents the first effective pipeline for panoptic segmentation and an extensive database for other researchers to use and deal with other data or related problems requiring a thorough scene understanding.
Bounding Box-Free Instance Segmentation Using Semi-Supervised Learning for Generating a City-Scale Vehicle Dataset
Nov 23, 2021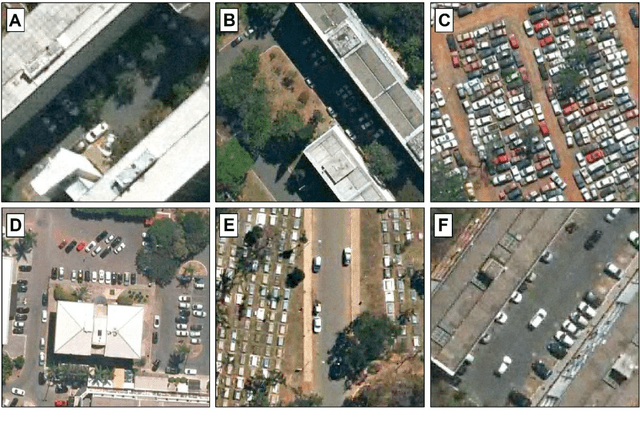

Vehicle classification is a hot computer vision topic, with studies ranging from ground-view up to top-view imagery. In remote sensing, the usage of top-view images allows for understanding city patterns, vehicle concentration, traffic management, and others. However, there are some difficulties when aiming for pixel-wise classification: (a) most vehicle classification studies use object detection methods, and most publicly available datasets are designed for this task, (b) creating instance segmentation datasets is laborious, and (c) traditional instance segmentation methods underperform on this task since the objects are small. Thus, the present research objectives are: (1) propose a novel semi-supervised iterative learning approach using GIS software, (2) propose a box-free instance segmentation approach, and (3) provide a city-scale vehicle dataset. The iterative learning procedure considered: (1) label a small number of vehicles, (2) train on those samples, (3) use the model to classify the entire image, (4) convert the image prediction into a polygon shapefile, (5) correct some areas with errors and include them in the training data, and (6) repeat until results are satisfactory. To separate instances, we considered vehicle interior and vehicle borders, and the DL model was the U-net with the Efficient-net-B7 backbone. When removing the borders, the vehicle interior becomes isolated, allowing for unique object identification. To recover the deleted 1-pixel borders, we proposed a simple method to expand each prediction. The results show better pixel-wise metrics when compared to the Mask-RCNN (82% against 67% in IoU). On per-object analysis, the overall accuracy, precision, and recall were greater than 90%. This pipeline applies to any remote sensing target, being very efficient for segmentation and generating datasets.