 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Adaptive Kalman Filter that Learns the Coloring Dynamics of the Process Noise
Apr 23, 2026In many applications of state estimation, the process noise is colored; this case is addressed by applying the standard Kalman filter (KF) to dynamics that are augmented with the coloring dynamics. The present paper considers the case where the coloring dynamics are unknown, which renders the estimates obtained from the standard approach suboptimal. To address this problem, the present paper proposes an adaptive technique based on the principle that, if the measurement noise is white, then the innovations sequence is white if and only if the process noise is white. Leveraging this fact, an Innovations-Whitening Adaptive Kalman Filter (IWAKF) is developed, which learns the process-noise coloring online. By embedding an unknown coloring filter in a state-augmentation framework, IWAKF adapts its parameters by minimizing the empirical autocorrelation of the innovations, thereby driving them toward whiteness and restoring near-optimality without prior knowledge of the coloring dynamics.
An Adaptive PID Autotuner for Multicopters with Experimental Results
Sep 27, 2021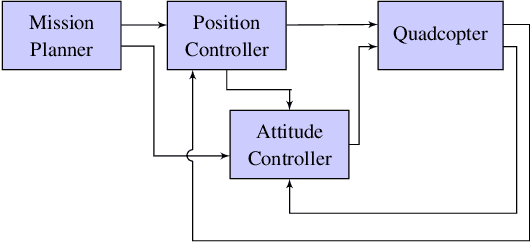
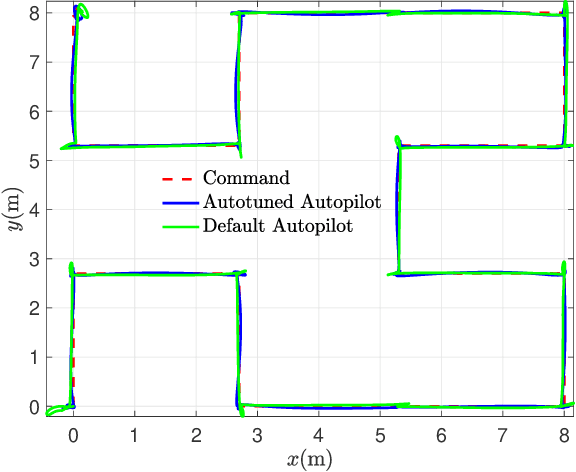
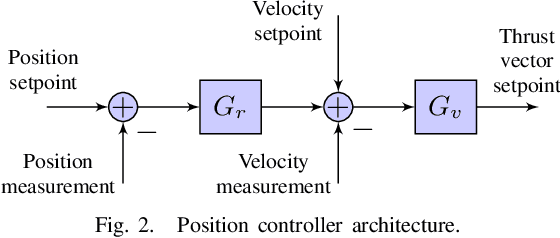
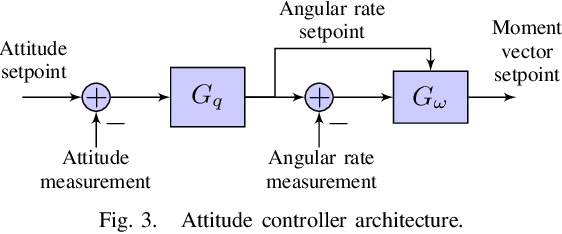
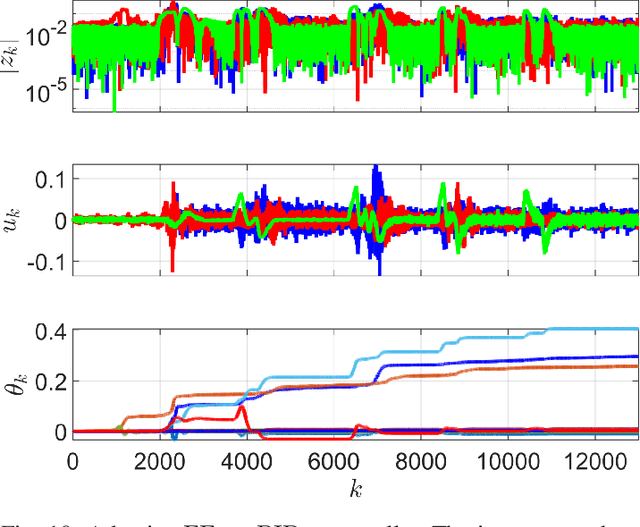
This paper develops an adaptive PID autotuner for multicopters, and presents simulation and experimental results. The autotuner consists of adaptive digital control laws based on retrospective cost adaptive control implemented in the PX4 flight stack. A learning trajectory is used to optimize the autopilot during a single flight. The autotuned autopilot is then compared with the default PX4 autopilot by flying a test trajectory constructed using the second-order Hilbert curve. In order to investigate the sensitivity of the autotuner to the quadcopter dynamics, the mass of the quadcopter is varied, and the performance of the autotuned and default autopilot is compared. It is observed that the autotuned autopilot outperforms the default autopilot.
Adaptive Digital PID Control of a Quadcopter with Unknown Dynamics
May 31, 2020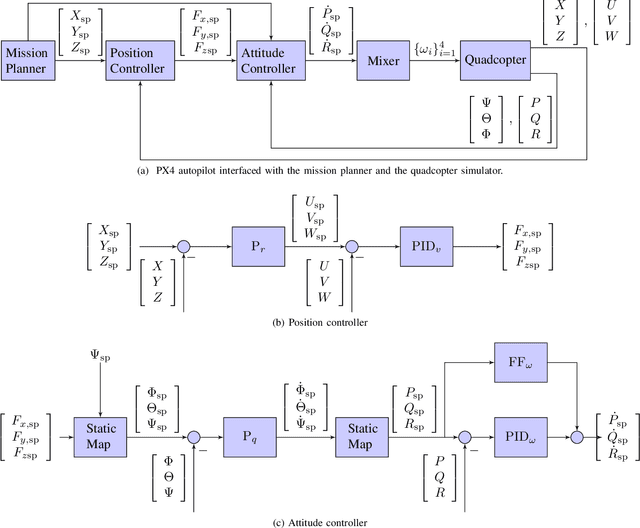
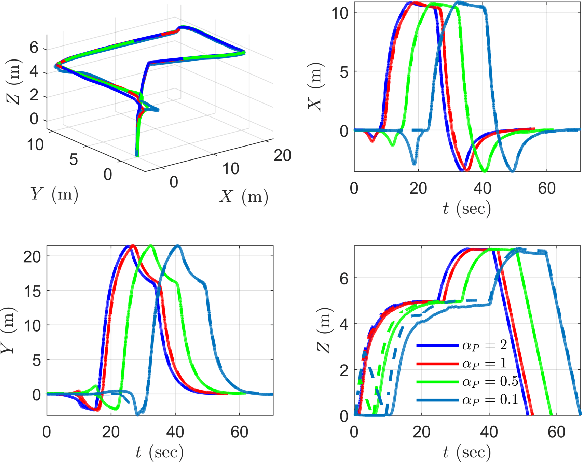
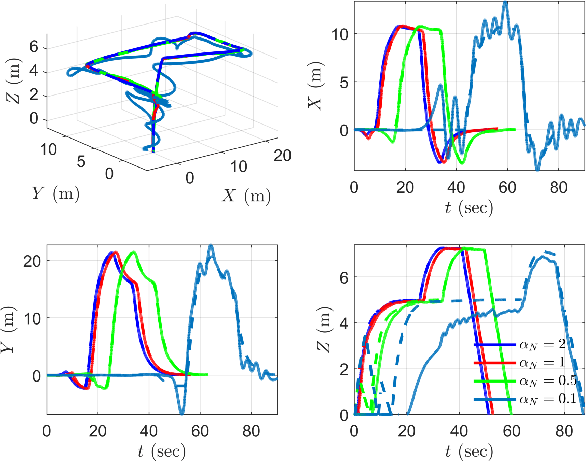
This paper develops an adaptive autopilot for quadcopters with unknown dynamics. To do this, the PX4 autopilot architecture is modified so that the feedback and feedforward controllers are replaced by adaptive control laws based on retrospective cost adaptive control (RCAC). The present paper provides a numerical investigation of the performance of the adaptive autopilot on a quadcopter with unknown dynamics. In order to reflect the absence of prior modeling information, all of the adaptive digital controllers are initialized at zero gains. In addition, moment-of-inertia of the quadcopter is varied to test the robustness of the adaptive autopilot. In all test cases, the vehicle is commanded to follow a given trajectory, and the resulting performance is examined.